
DRL: Actor-Critic Method
DRL: Actor-Critic Method
detect0530@gmail.com
基本概念
Discounted Return
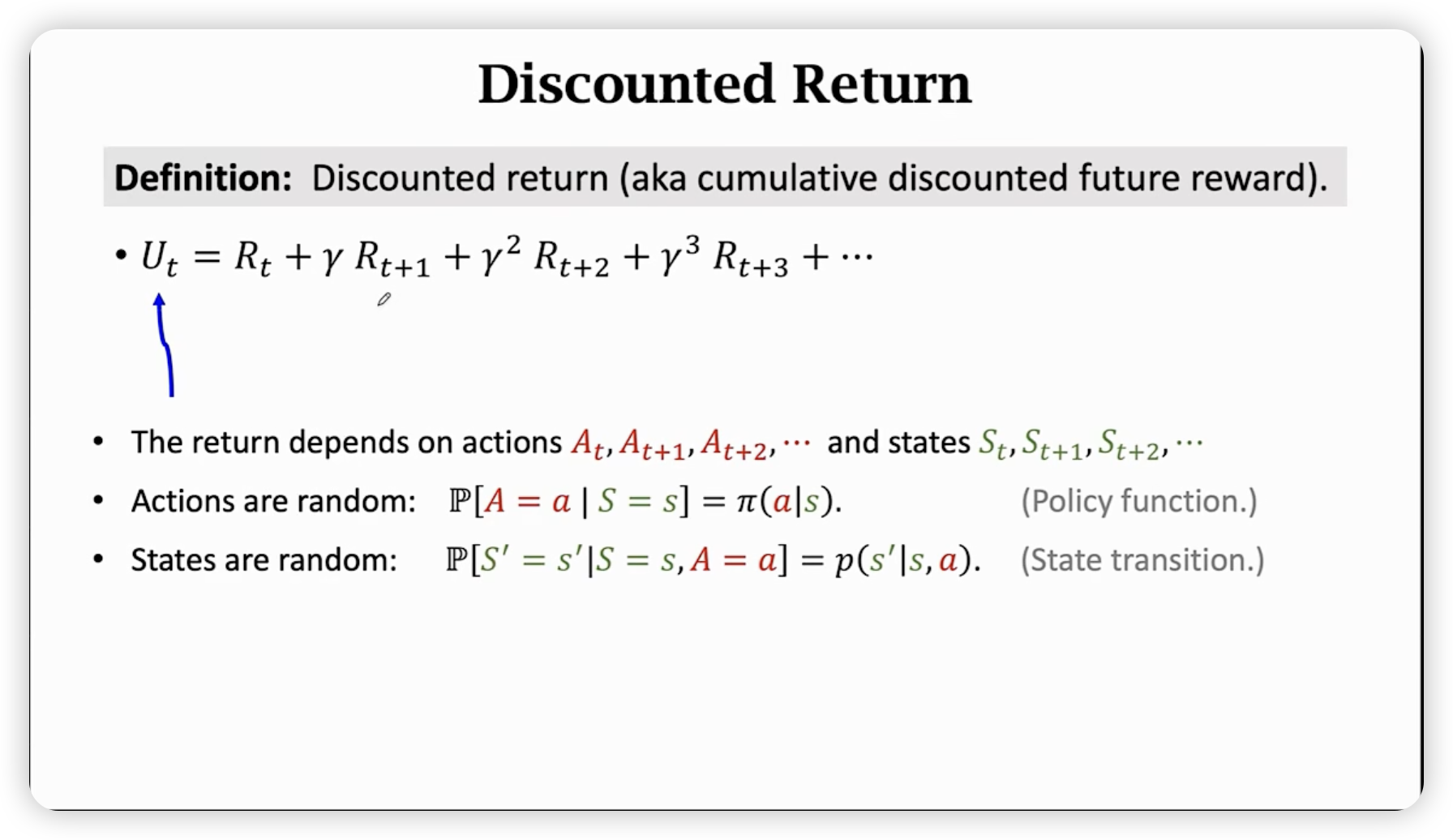
这个东西是一个随机变量,随机性由两部分构成,第一是Policy function给定状态s后选择的action。第二是State transition function给定状态s和action a后转移到下一个状态s’的概率。
Action-value Function Q(s,a)
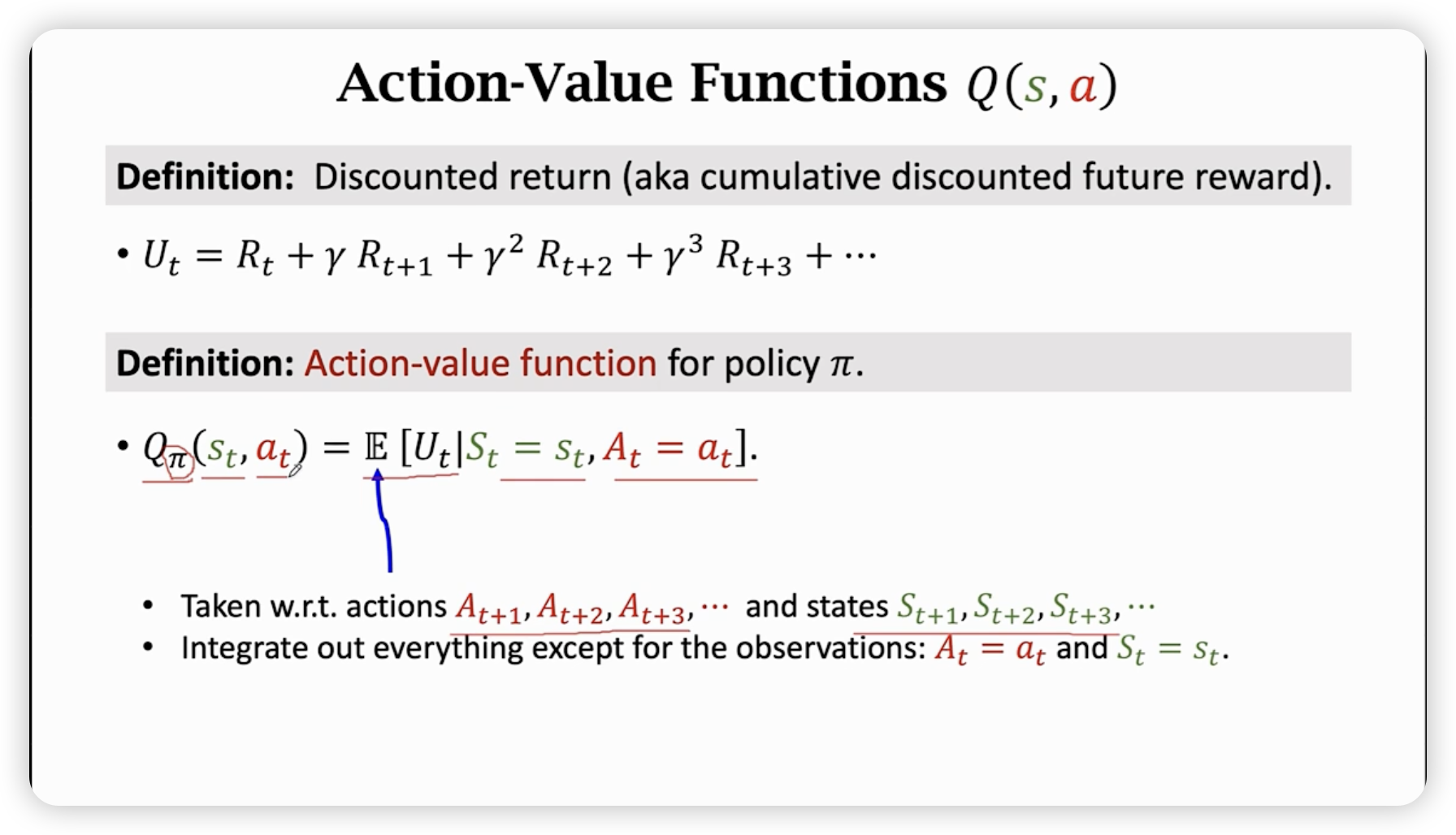
给定状态s和action a,这个函数返回的是在这个状态下采取这个action的期望回报。注意这个回报和策略函数有关,因为策略函数决定了在这个状态下采取哪个action。
Optimal Action-value Function
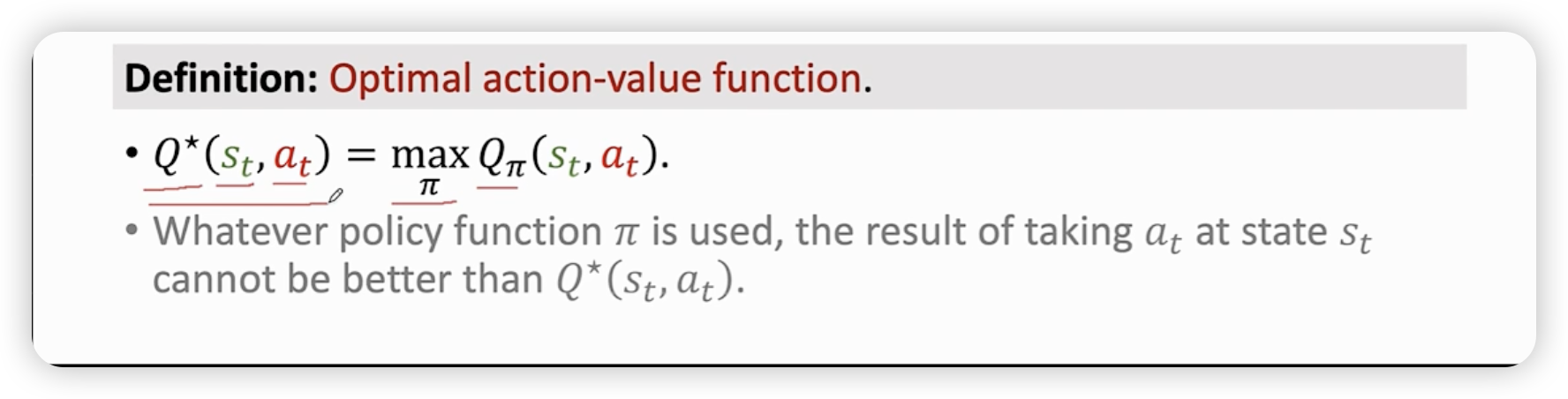
选择一个在当前状态和动作下最优的策略函数,让期望回报最大。
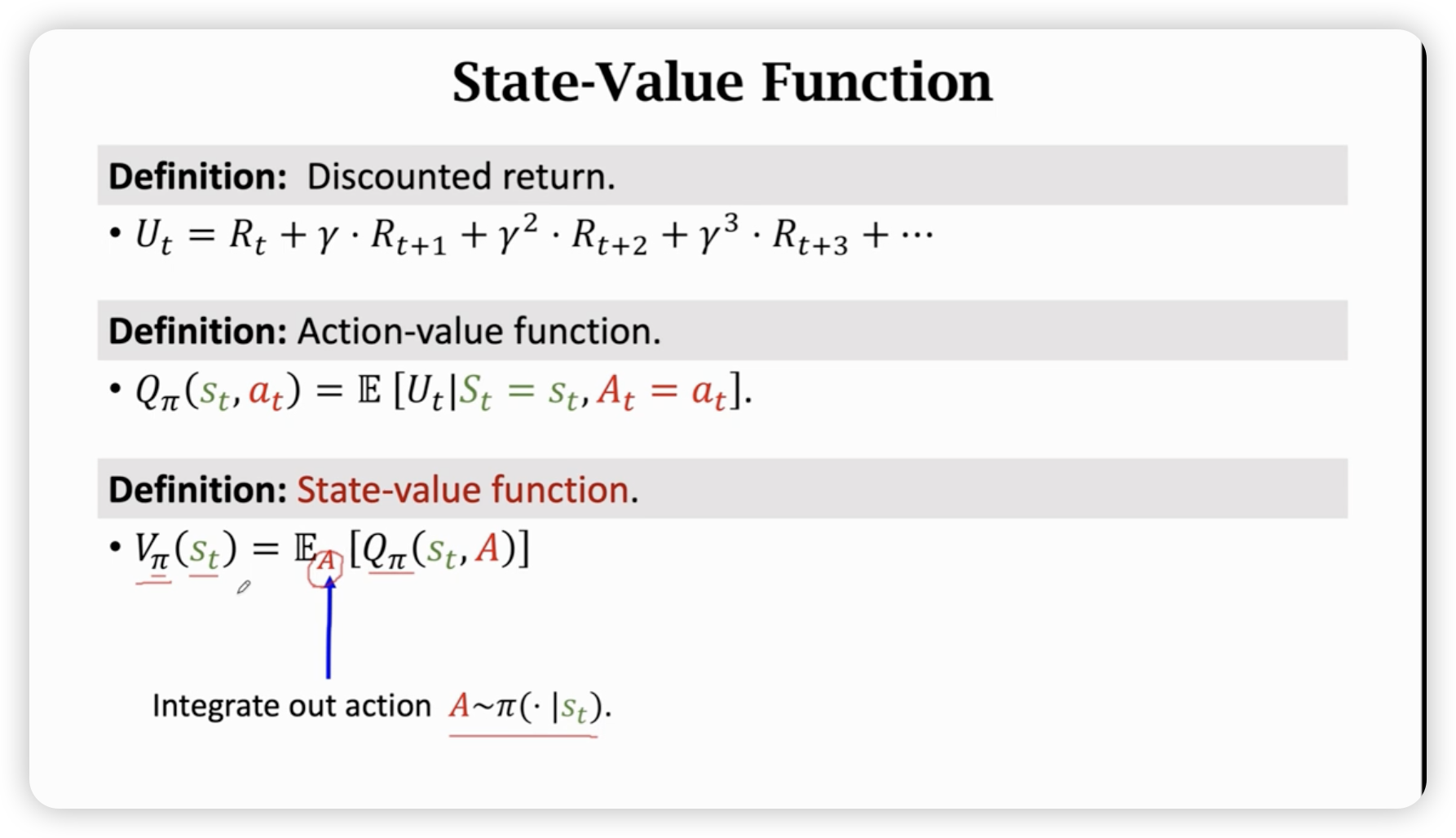
State-value Function
是对一个状态的评价,这个评价是基于决策函数的,给定状态s,则可以用来评价决策函数的好坏。
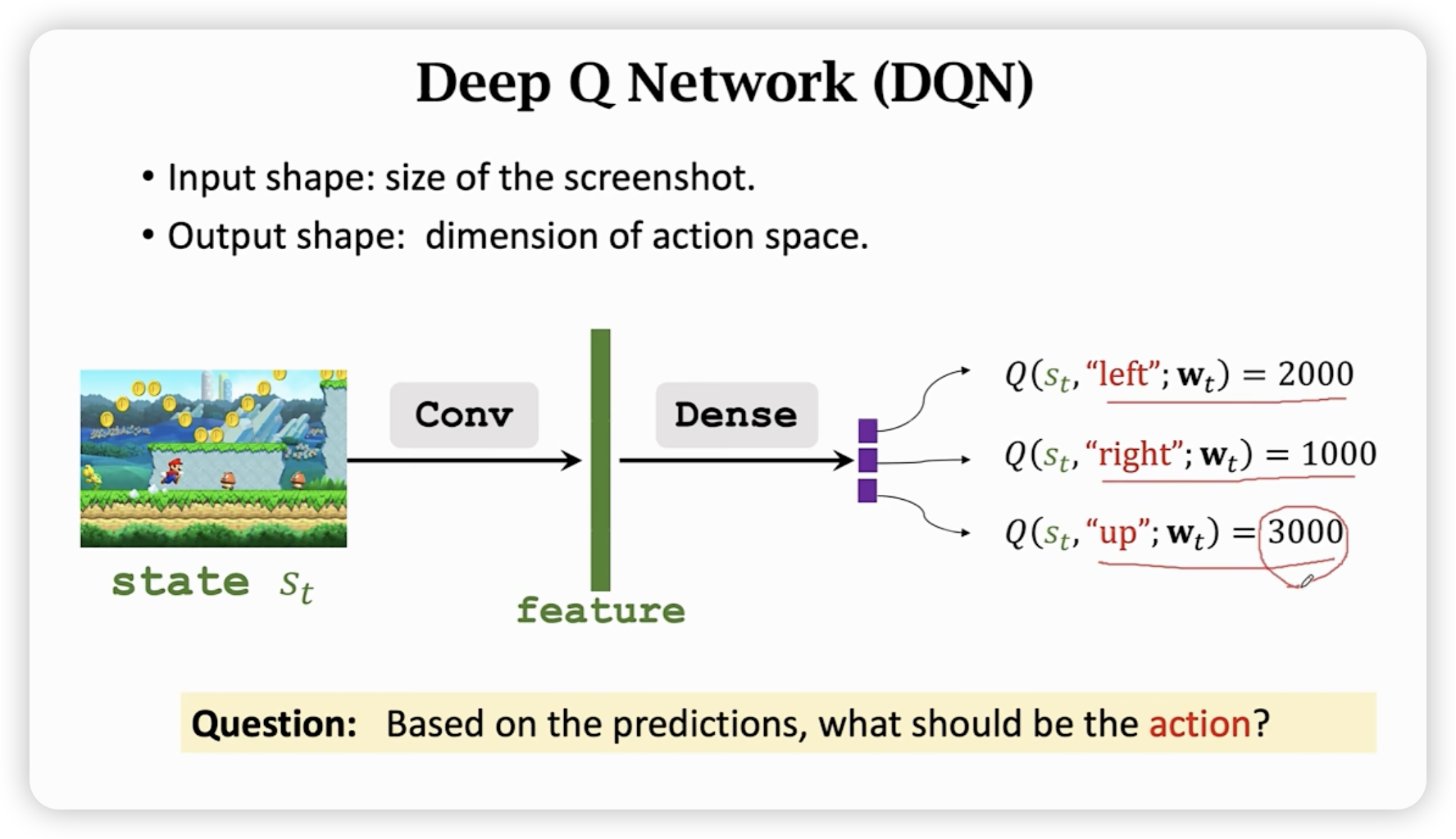
Deep Q-network (DQN)
Approximate the Q Funtion
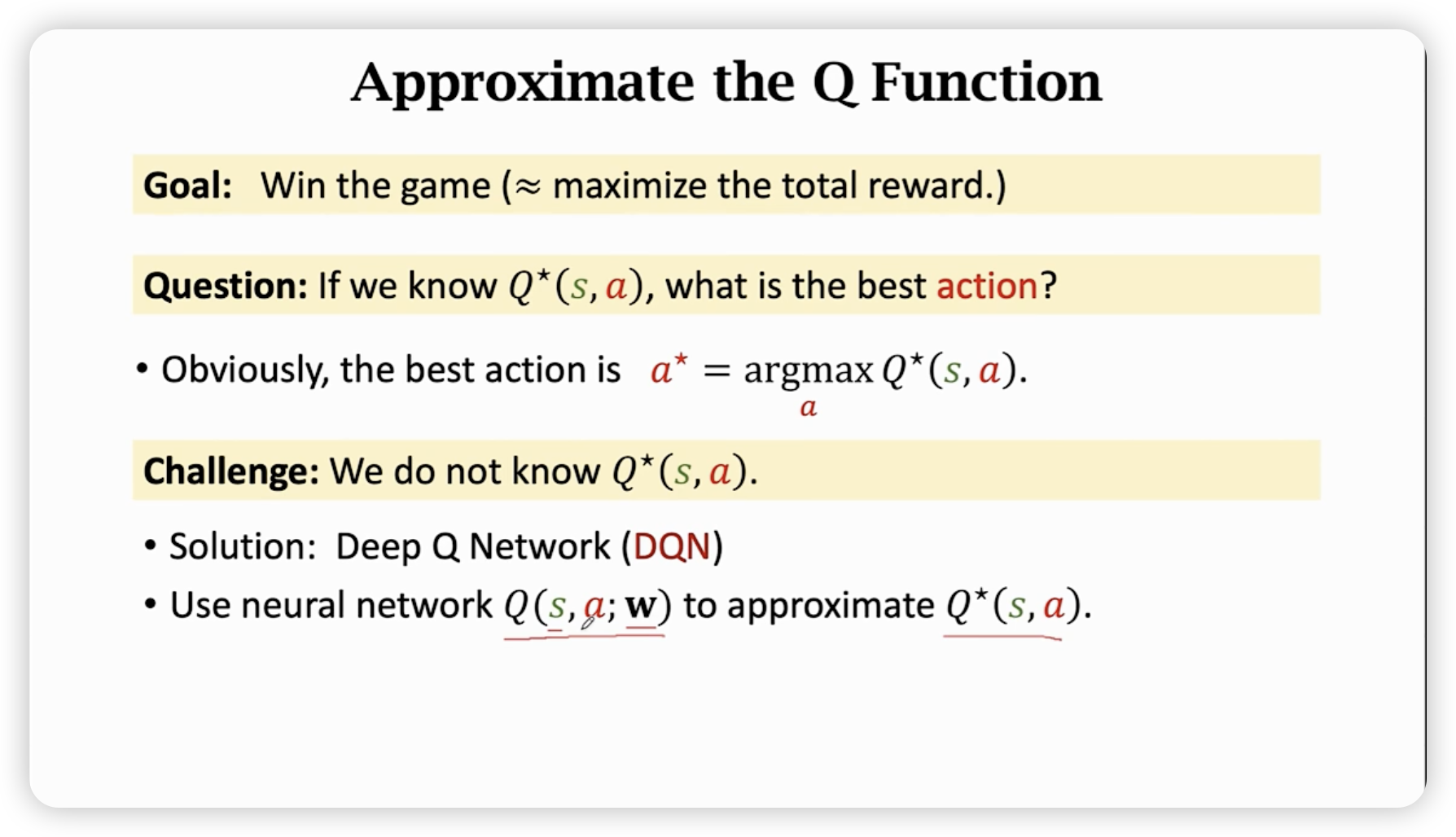
我们只需要知道的函数表达,就可以知道在s下走哪一个action最优,于是我们寄希望于用nenural network来近似拟合这个函数。
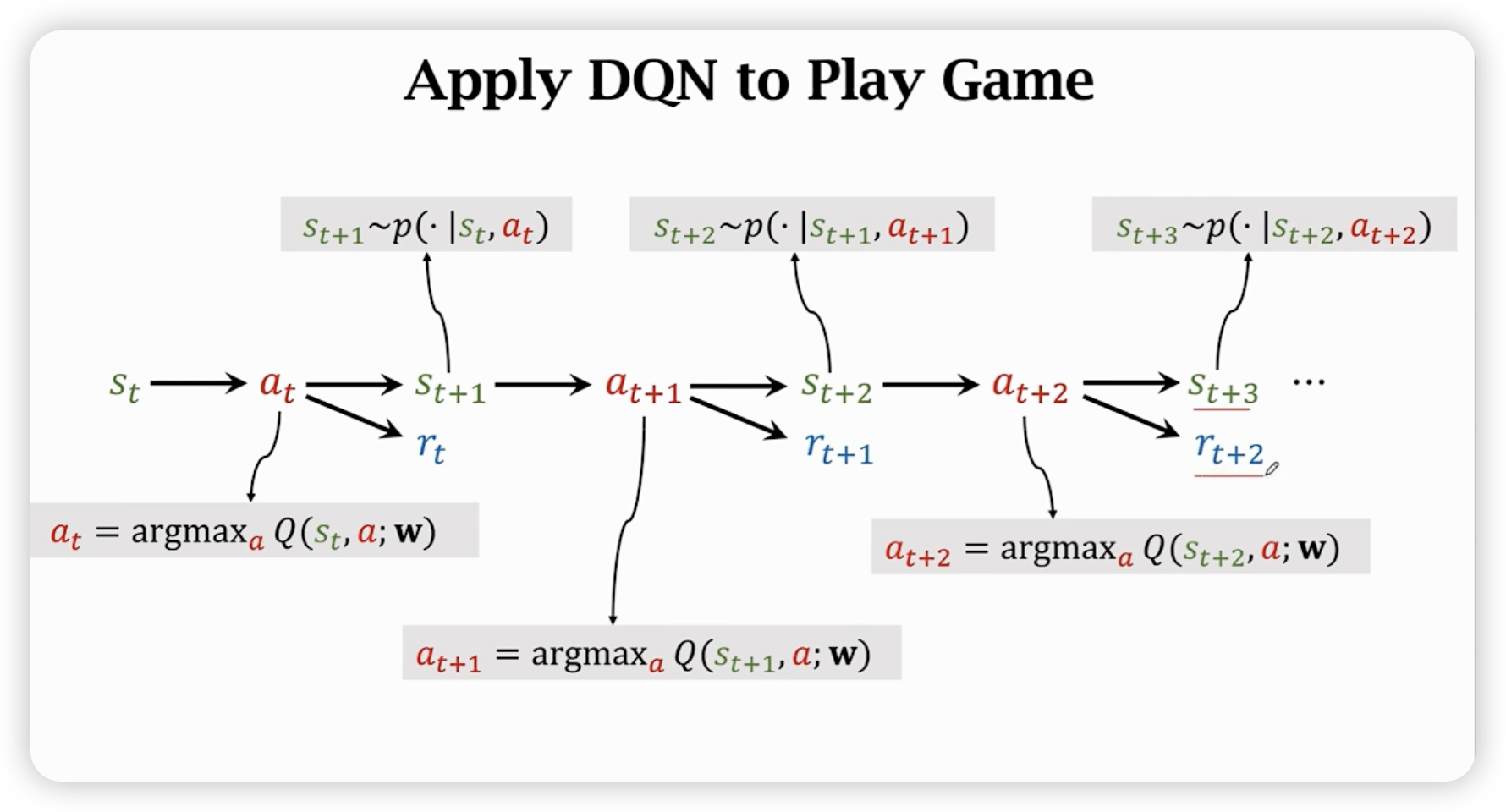
训练好网络后,就可以利用网络来决策最好的action。
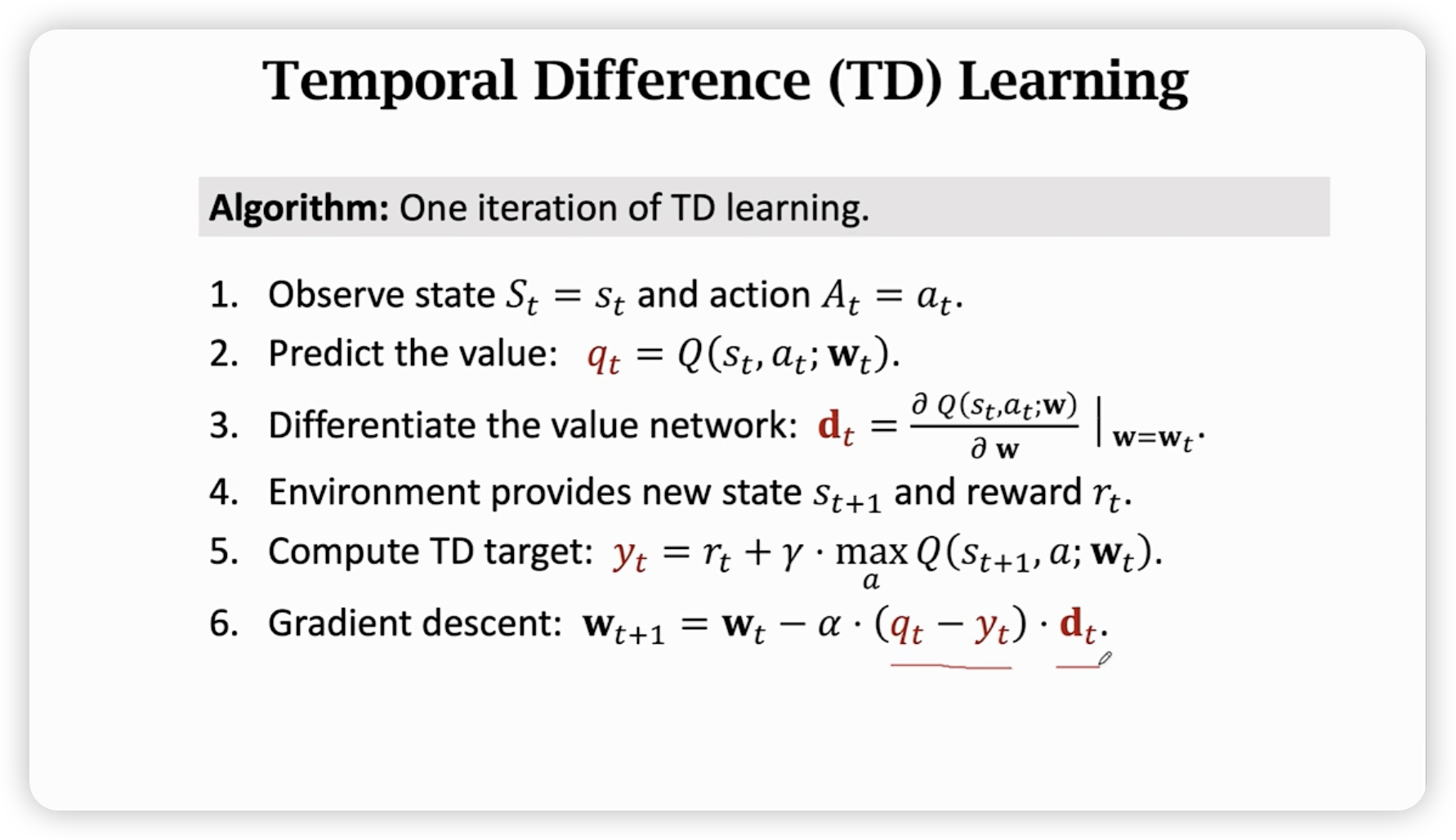
Temporal difference Learning
TD target: 用一部事实cost + 估计cost,随时间越来越准确。
这样在每一个时刻都可以用来算梯度更新模型参数。(不需要打完整场游戏就可以更新TD参数)
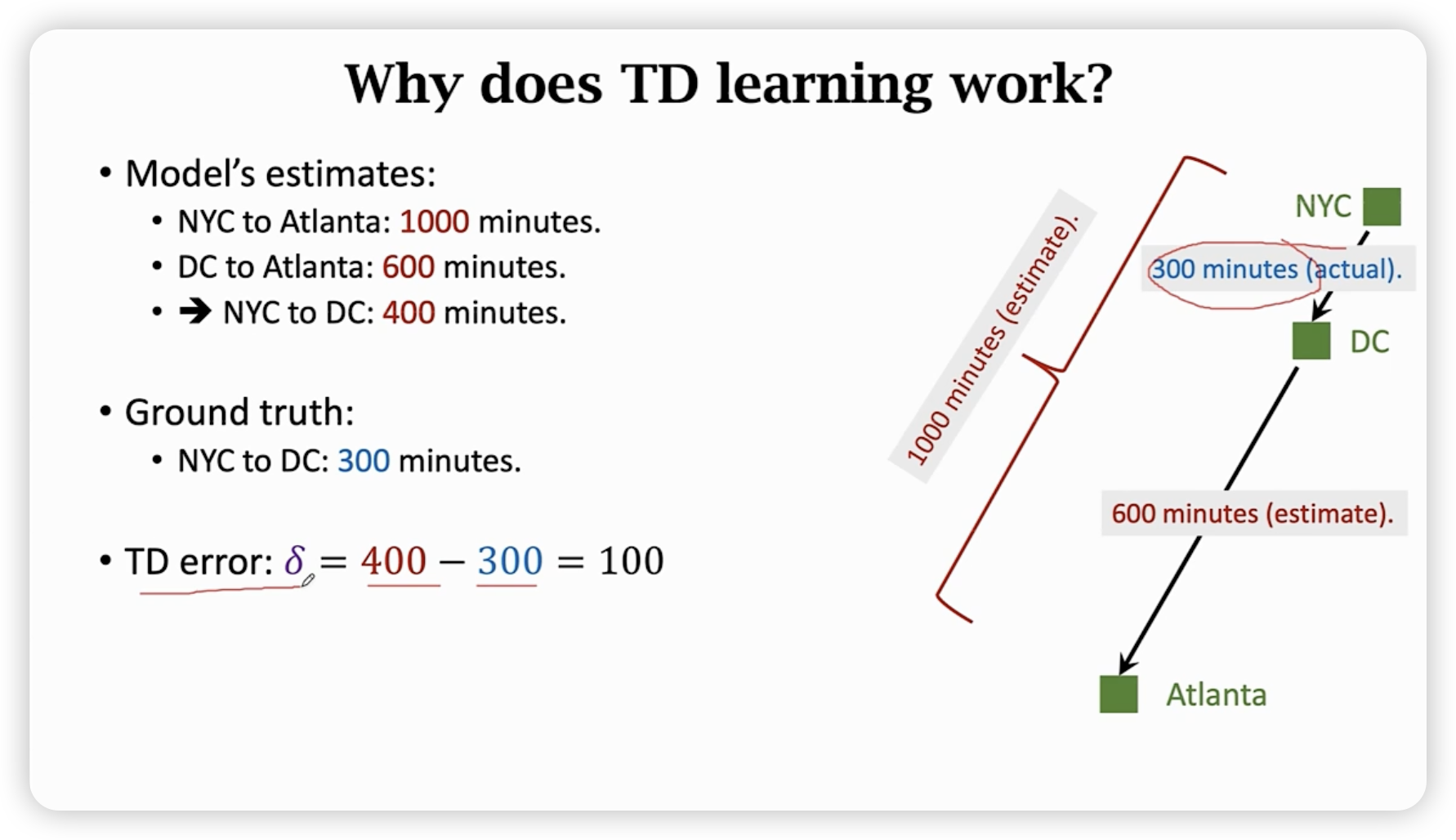
实际上是用梯度下降来减少TD error。
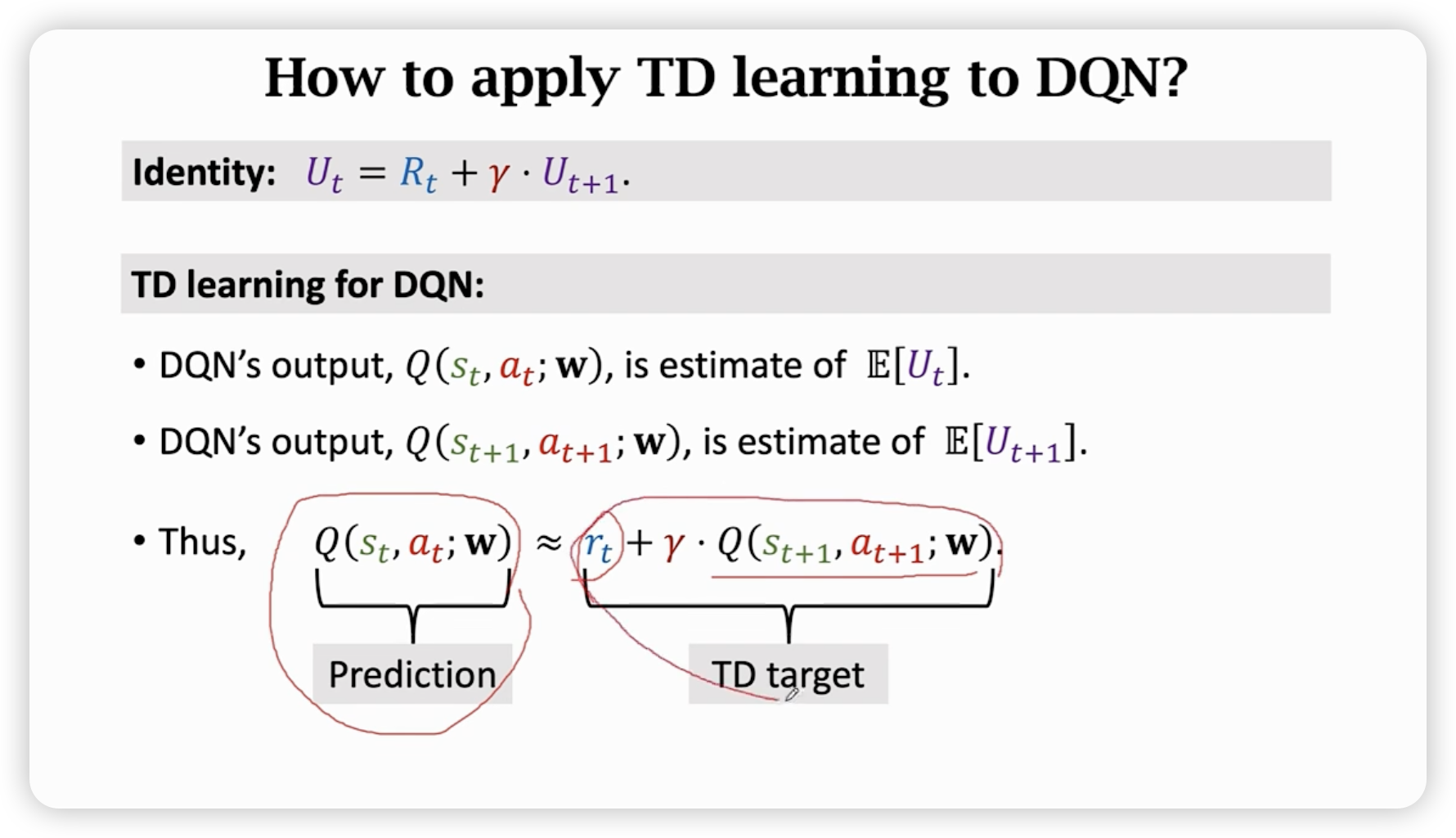
Apply TD Learning to DQN
我们知道有这样的式子关系:
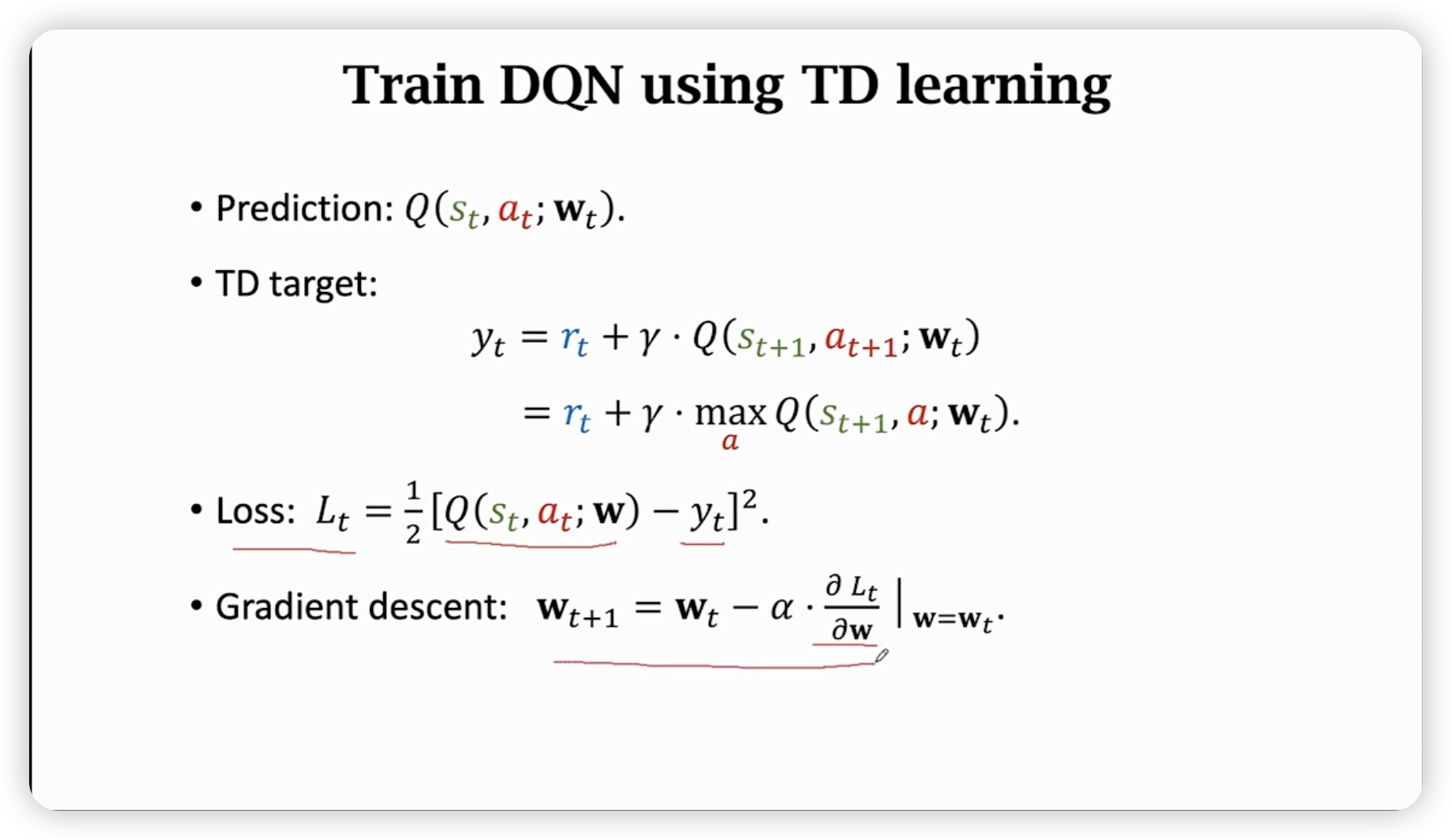
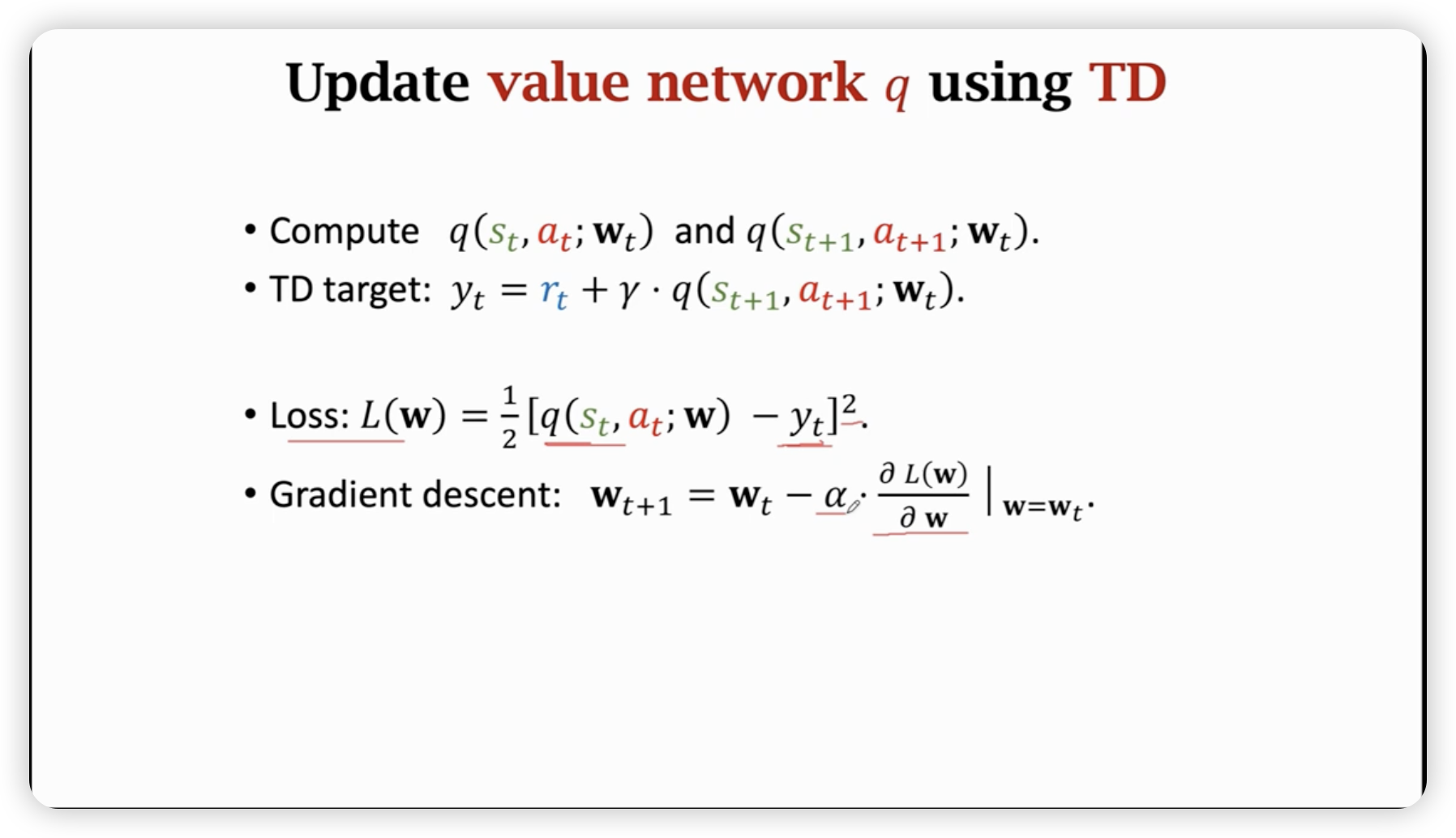
更形式一点,实际上,我们利用神经网络中打拼,然后通过计算TD target计算理应更精确的W_t^',利用这个loss对参数进行更新。
迭代过程
梯度算出参数和loss的关系,具体多了还是少了,由预测的和理应的W_t^'的差异决定。
Policy-Based Reinforcement Learning
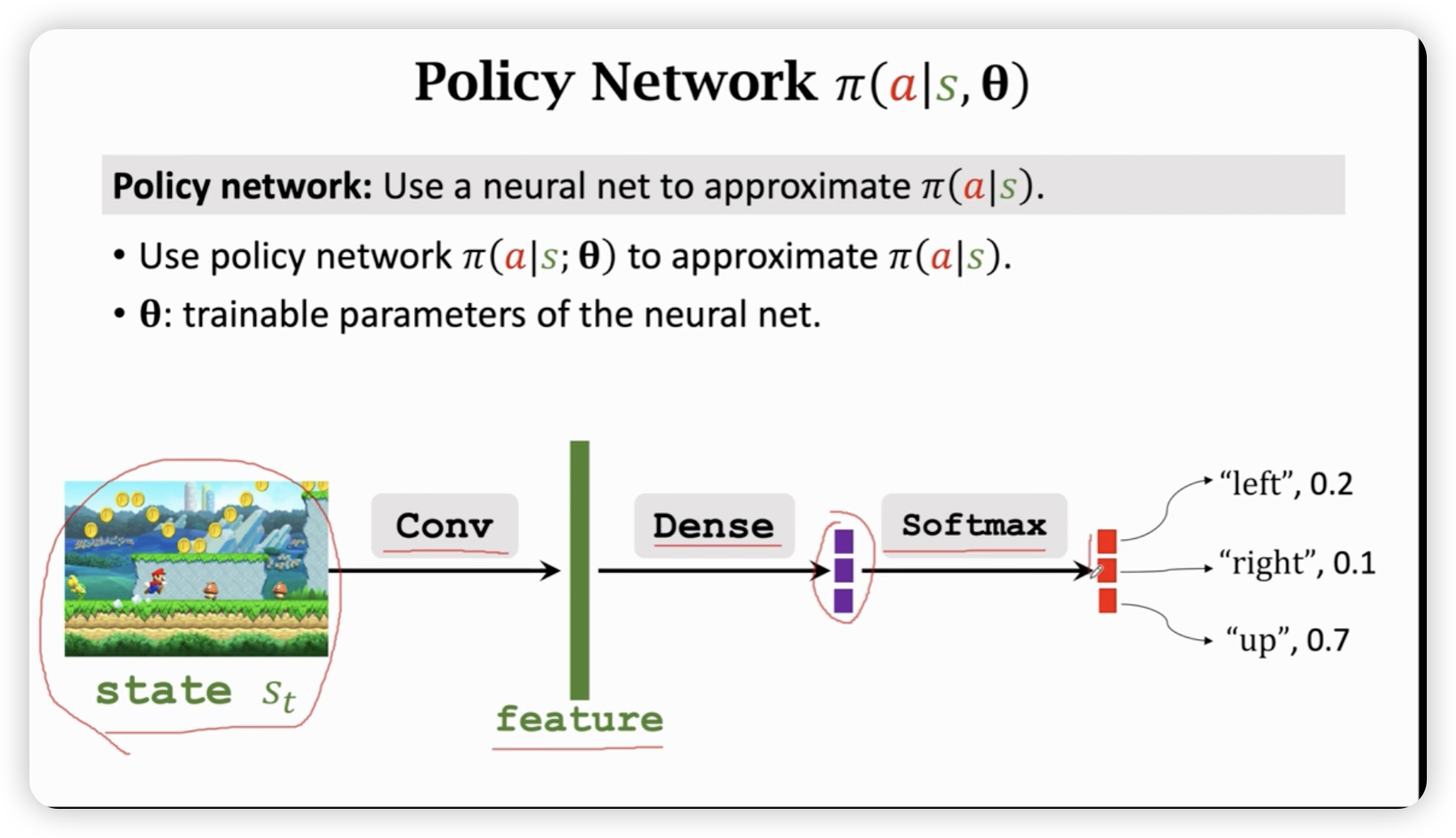
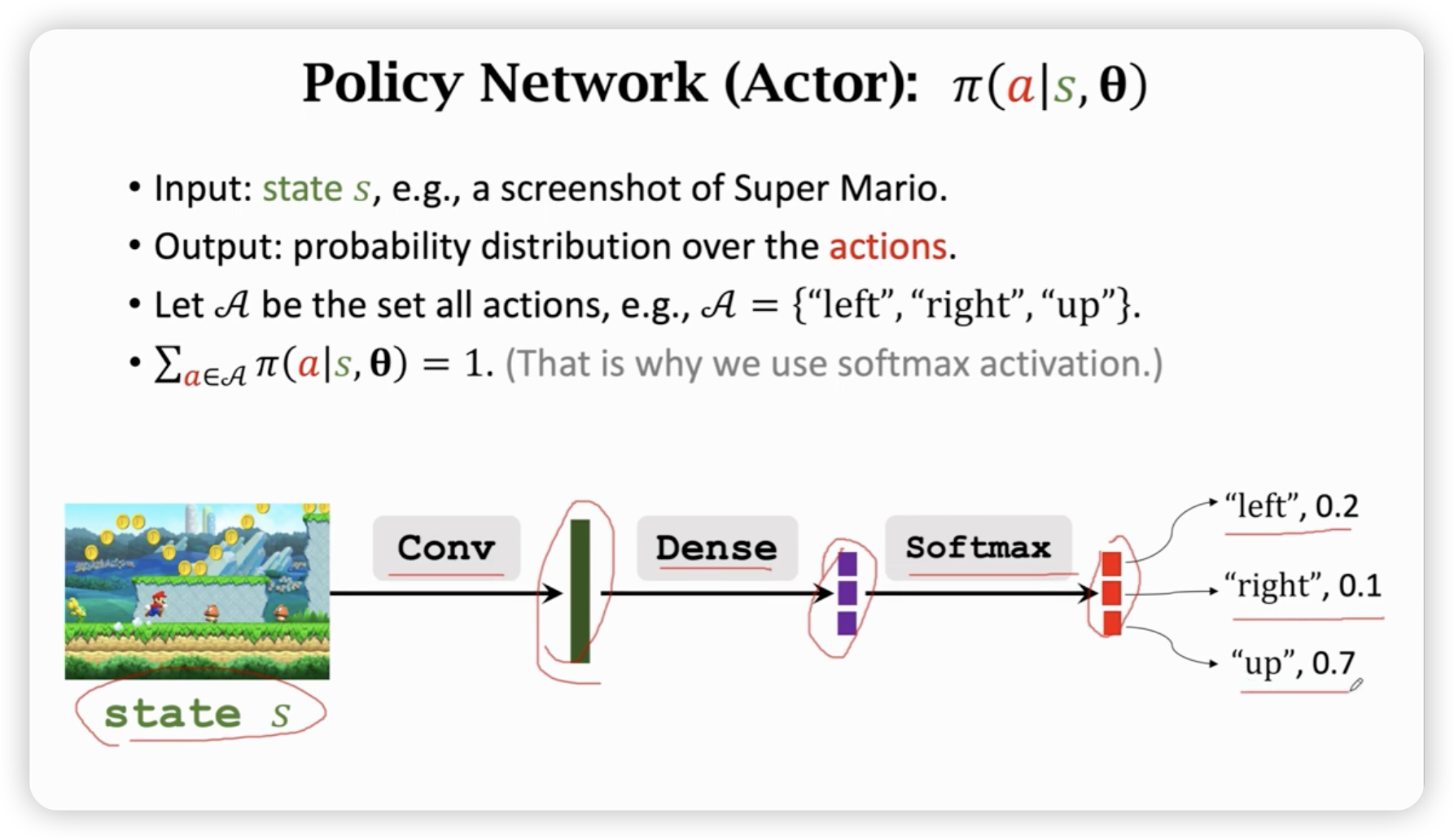
用神经网络近似策略函数。
策略函数的定义:(注意是一个随机变量,每次是一个抽样)
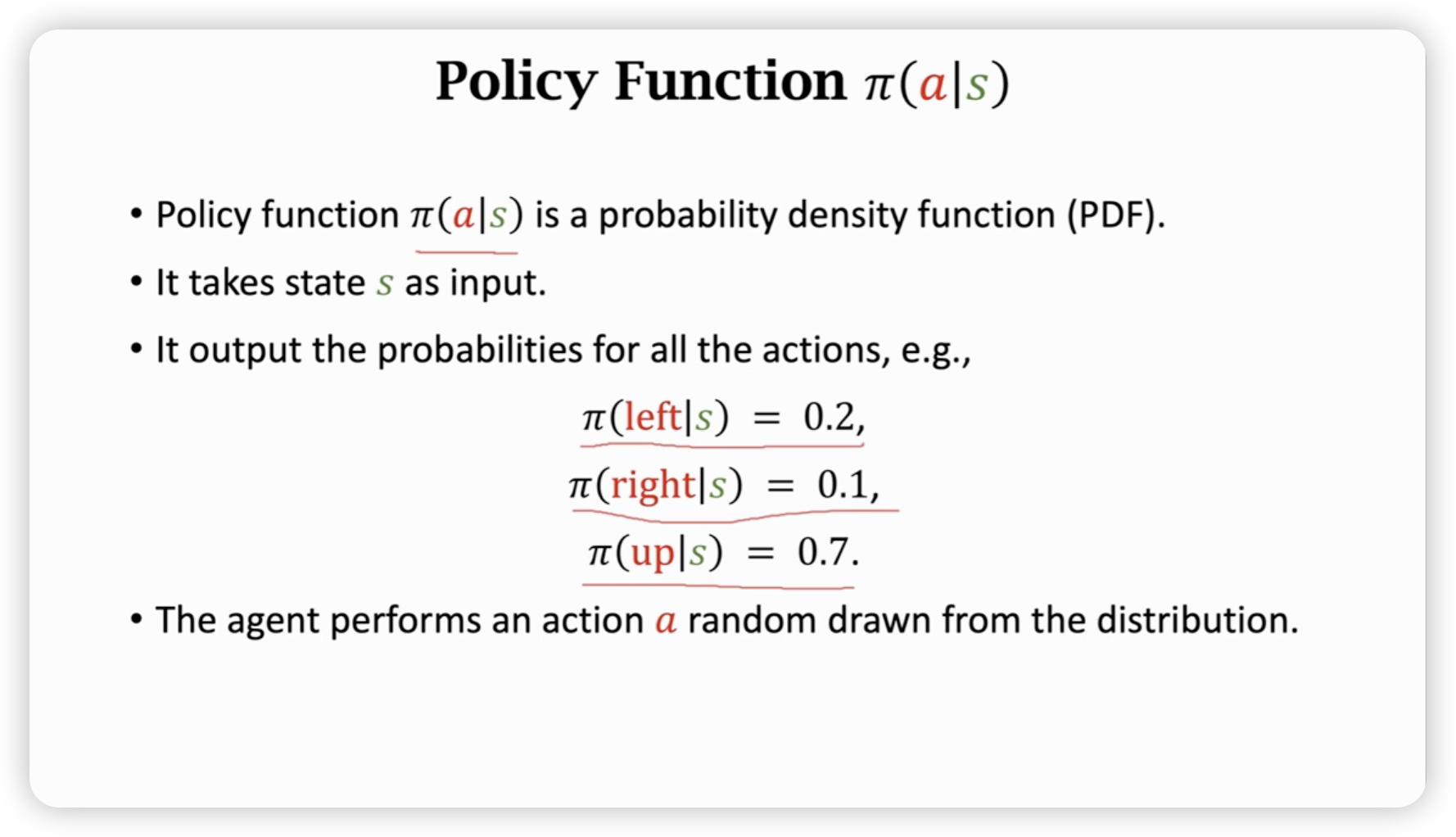
我们需要一个神经网络来近似这个策略函数。
在超级玛丽游戏中,我们可以用卷机网络来提取特征。
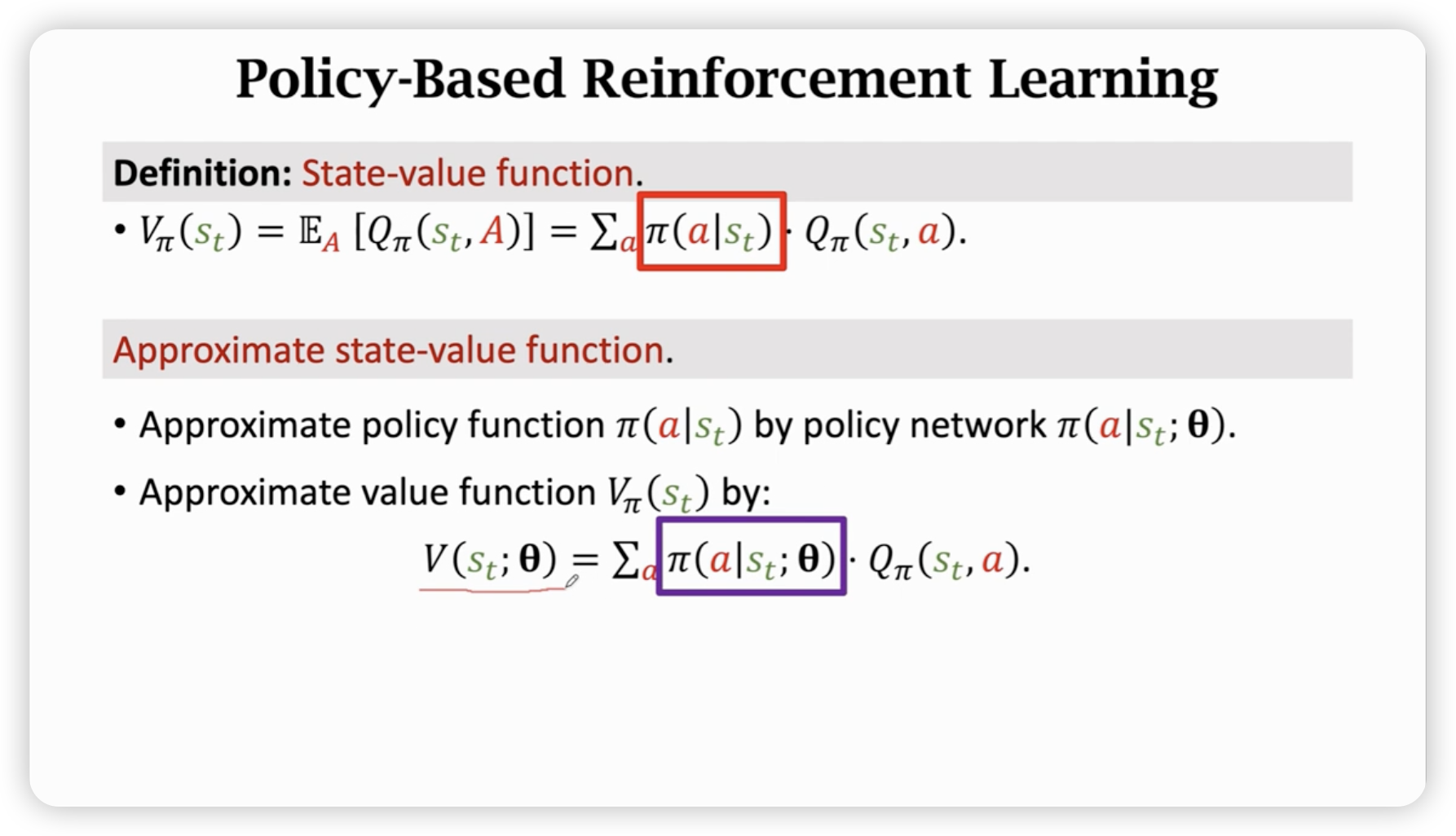
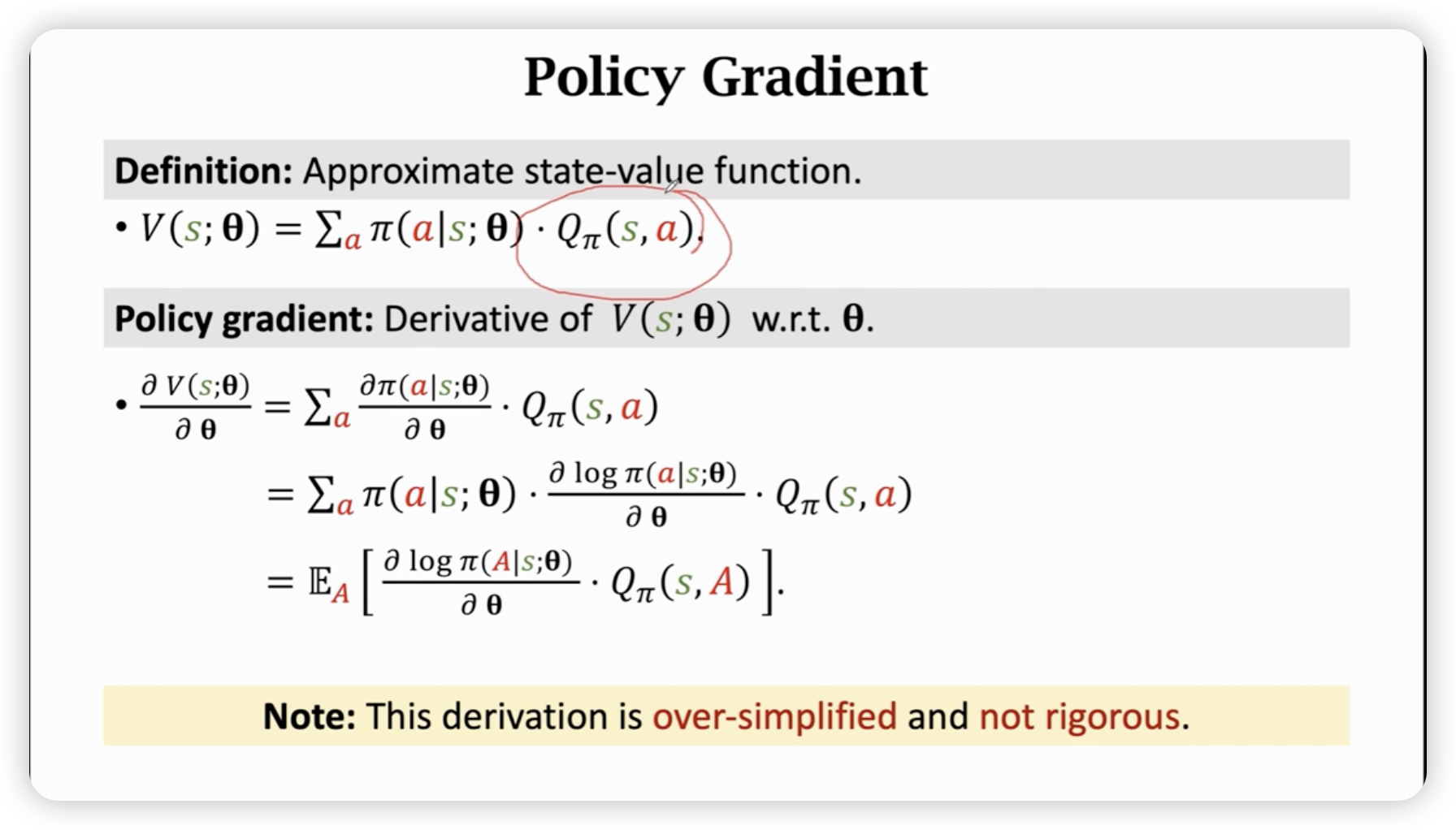
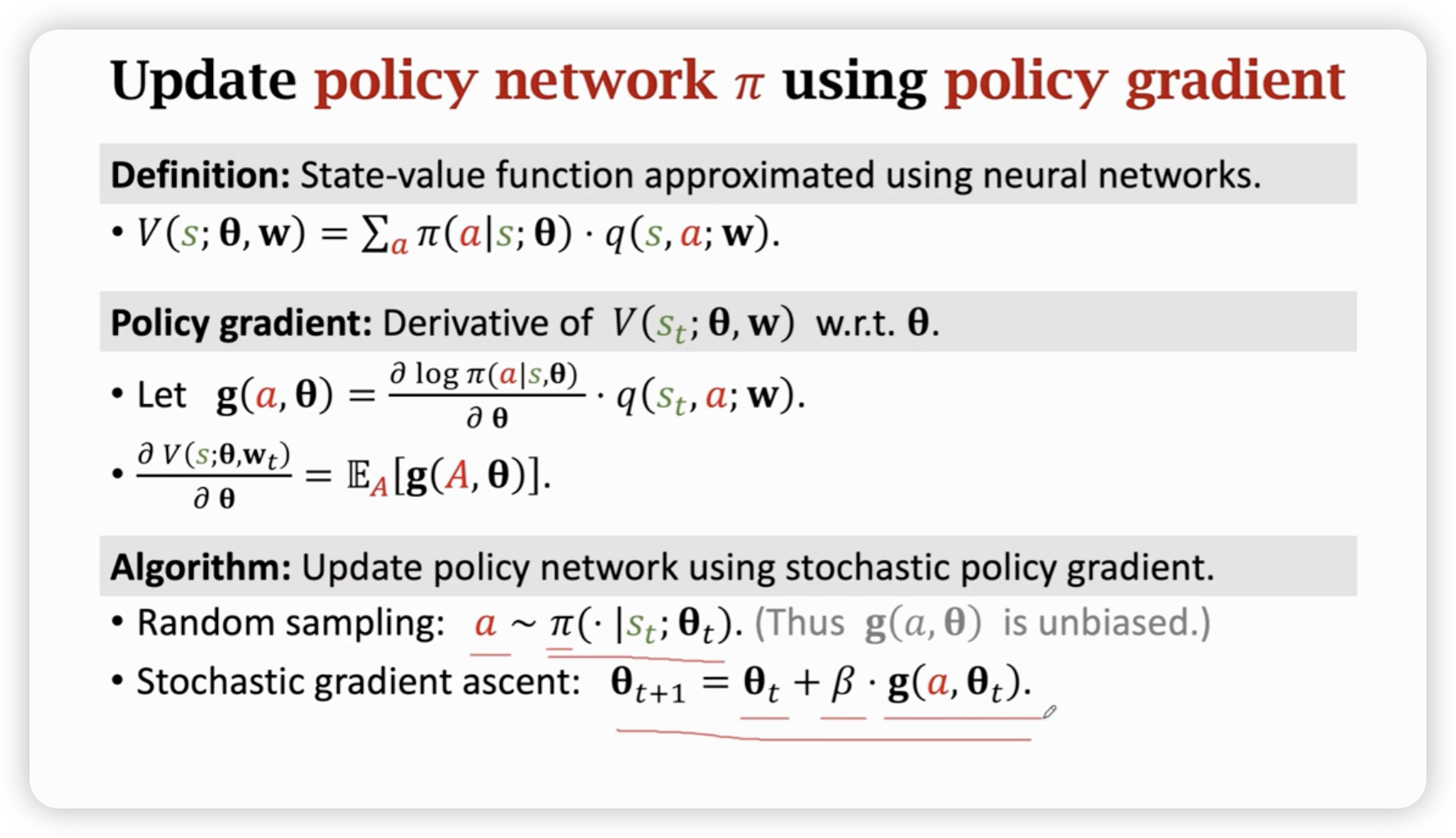
实际上,我们运用神经网络近似策略函数,然后当作权值去加权,得到近似的state-value function,最后我们希望这个state-value function最大,于是我们用梯度上升法去更新神经网络的参数。
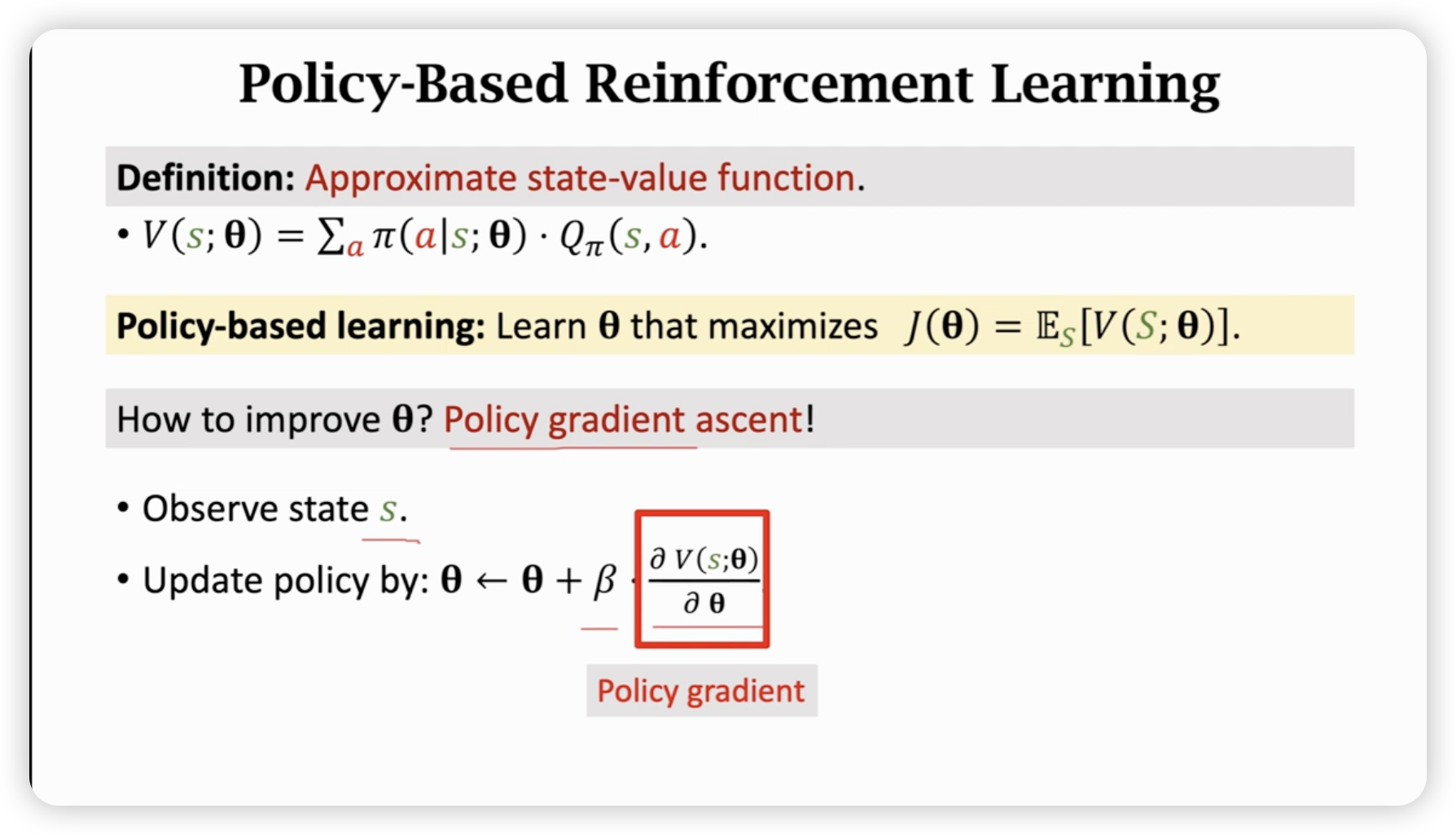
在一个状态中,沿着让这个状态的state-value function变大的方向走,和随机梯度上升算法类似。
一些关于策略梯度的数学推导:
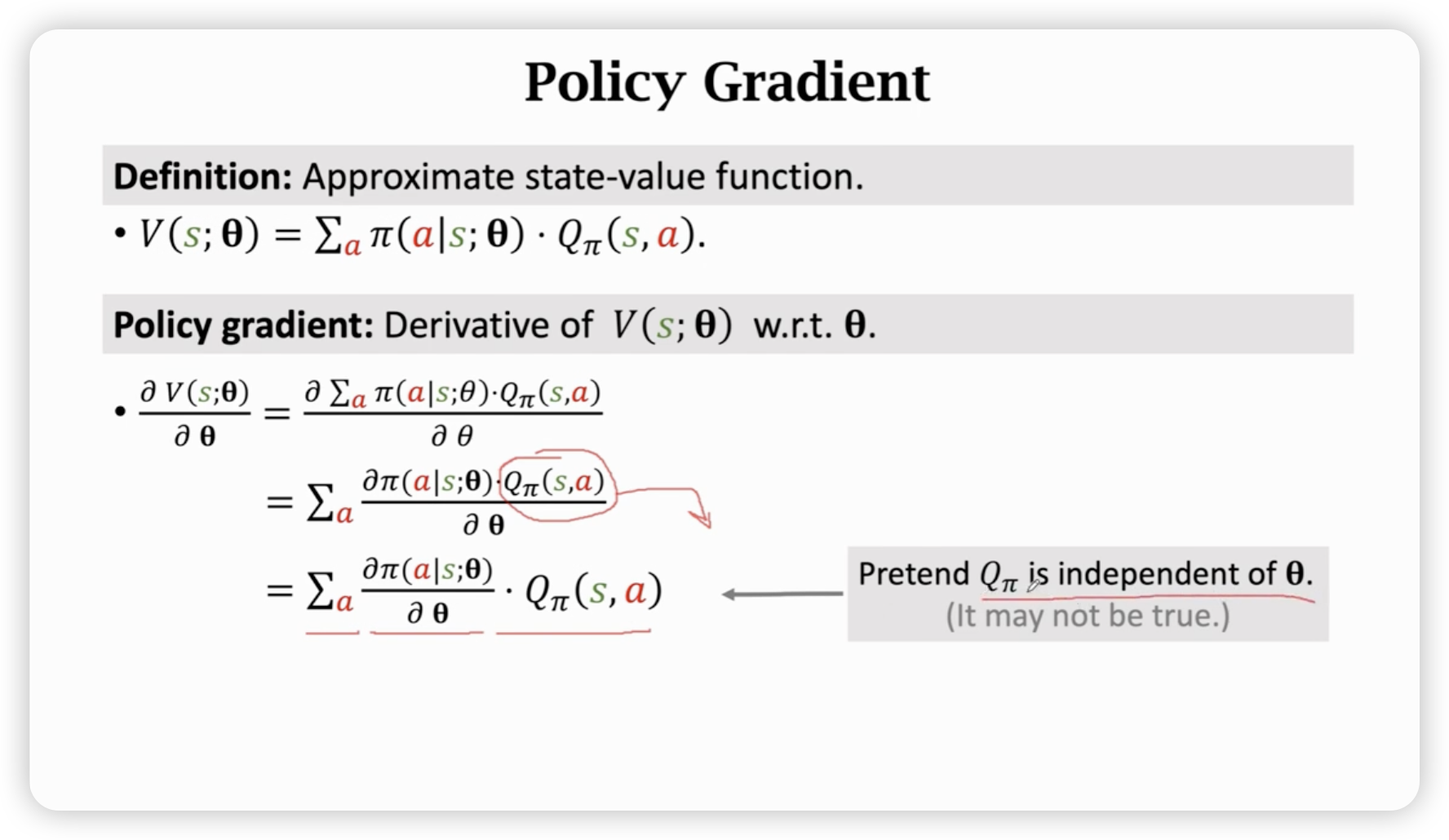
还可以做一个变形:
再依据具体问题离散与否,可以得到不同的策略梯度算法。
-
离散的时候
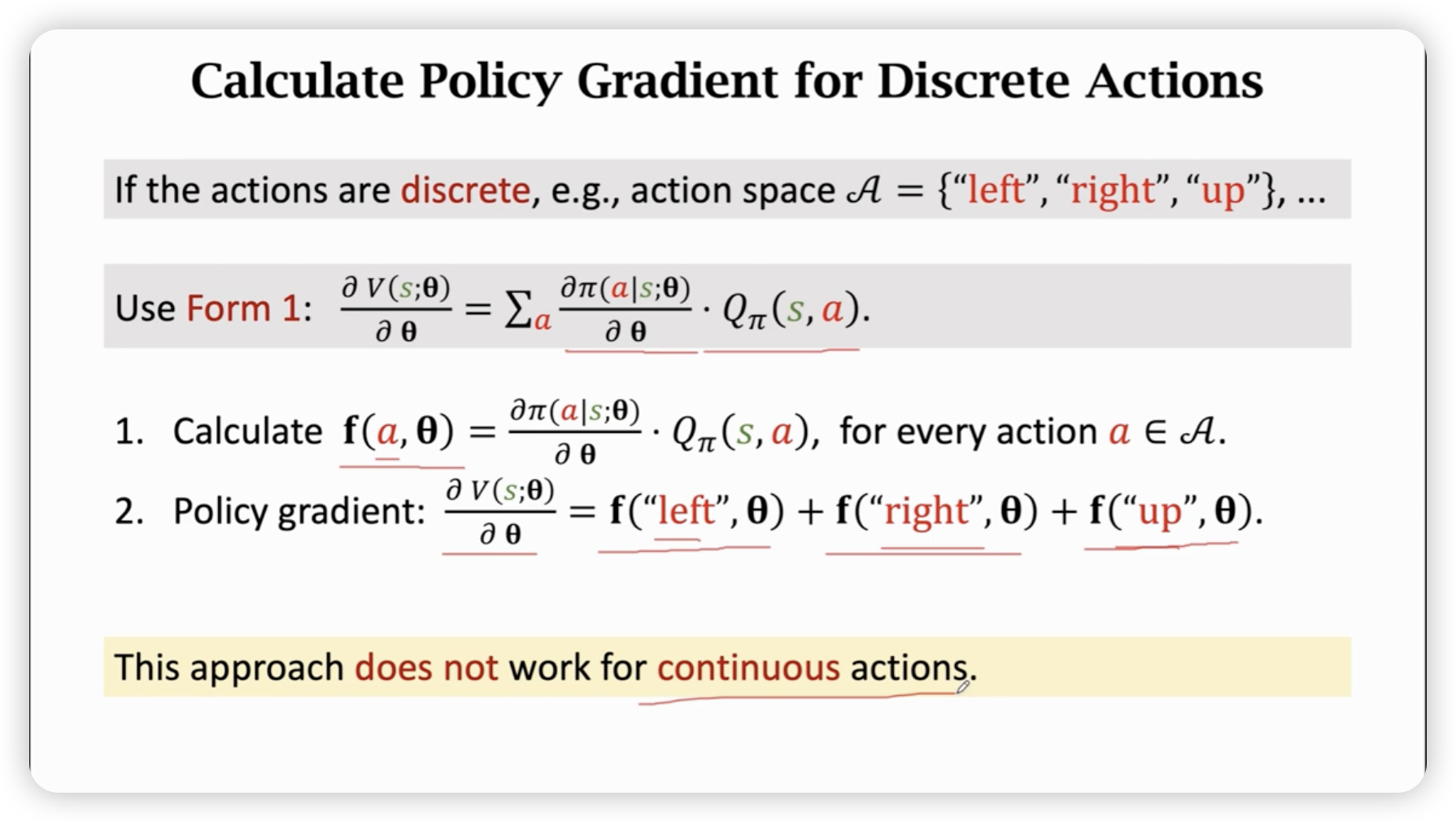
-
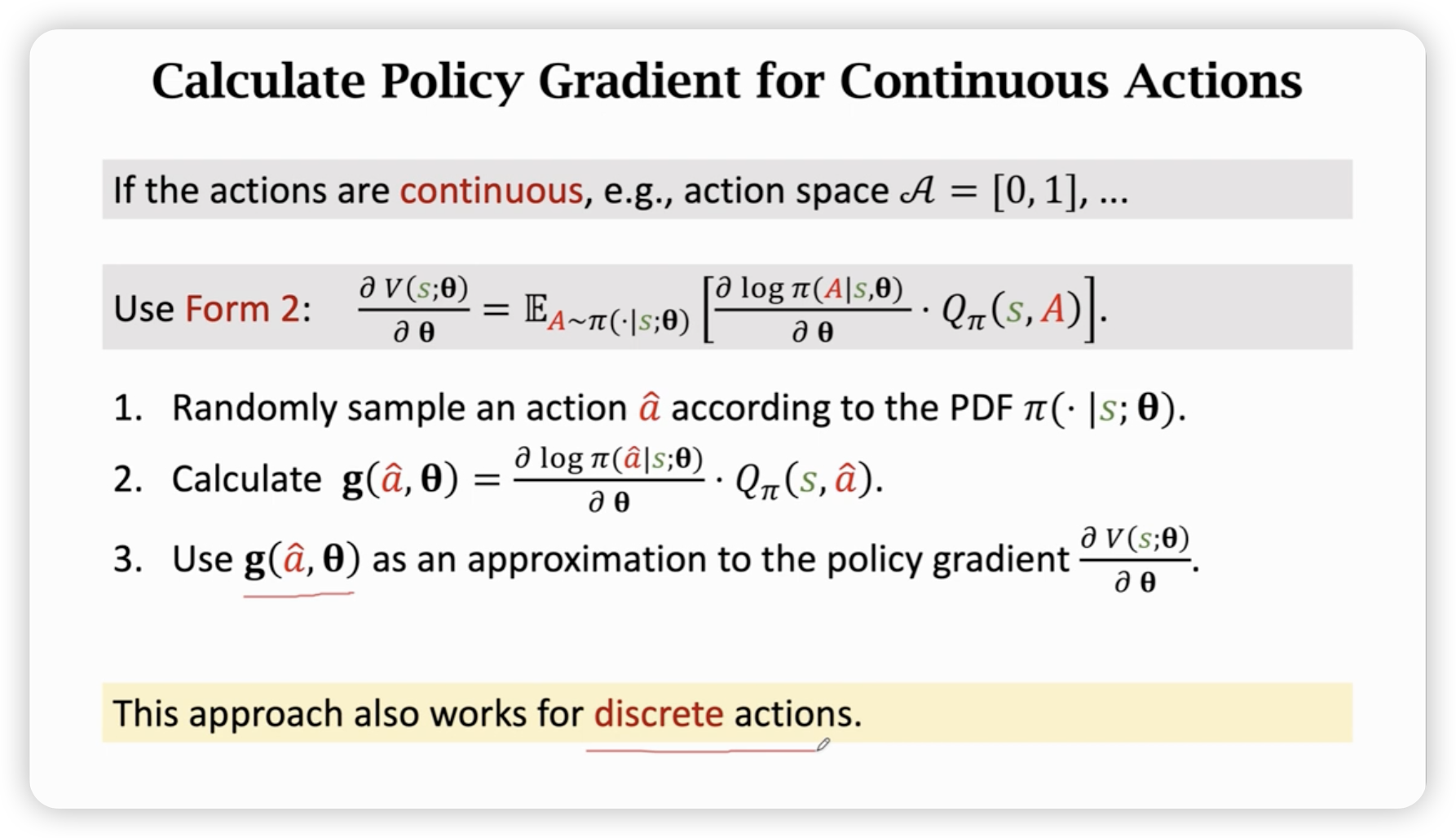
连续的时候
无法直接算积分,故采用蒙特卡洛近似。(就是抽样很多随机样本,无偏估计,对离散时候同样适用)
但是使用蒙特卡洛近似需要的一个期望(也就是一个权值分配),我们采用第二种变形变出来一个权值分配,于是就可以使用蒙特卡洛近似了。
迭代Algorithm
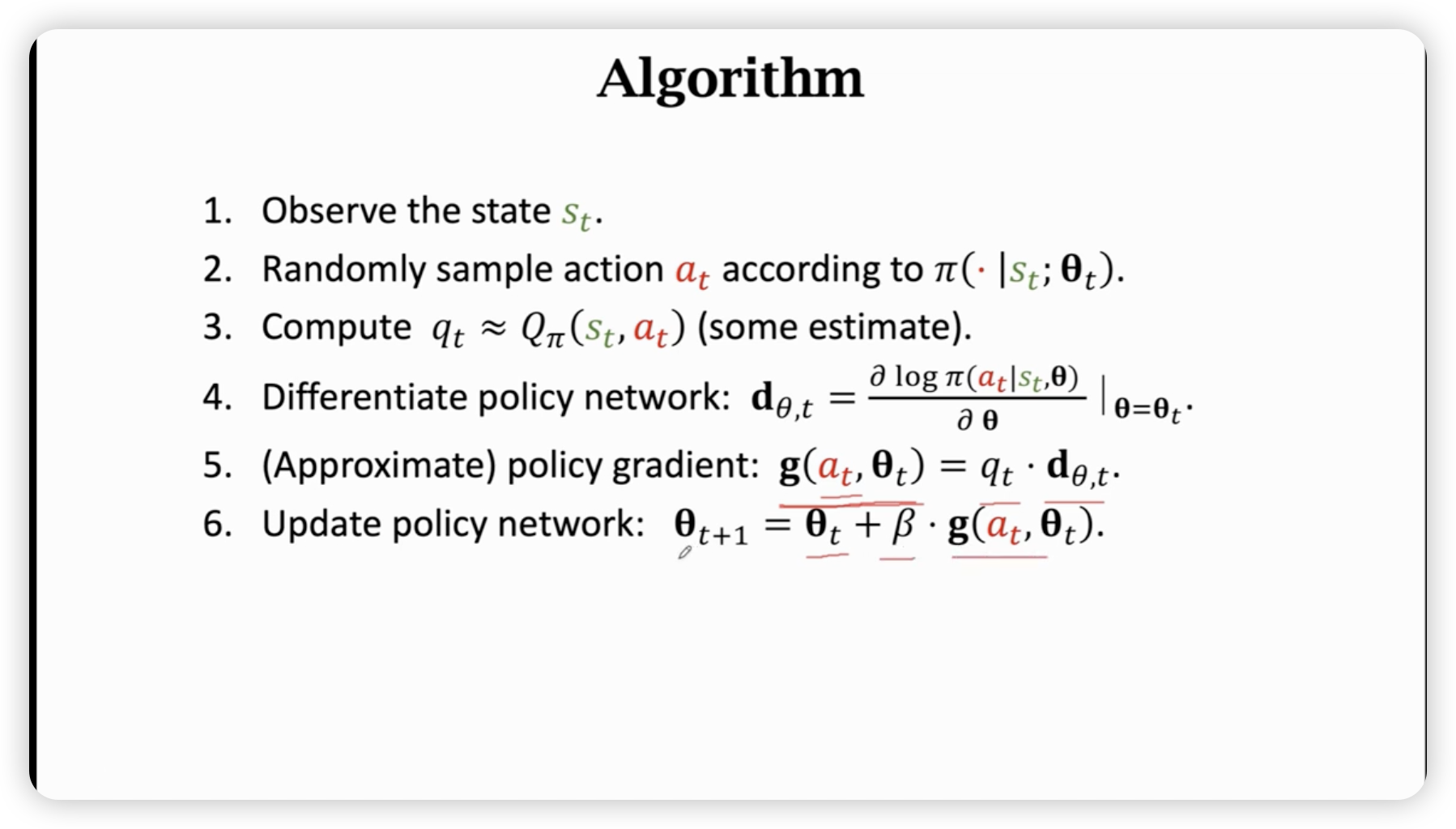
这里埋了一个雷,不知道怎么求,有两种办法。
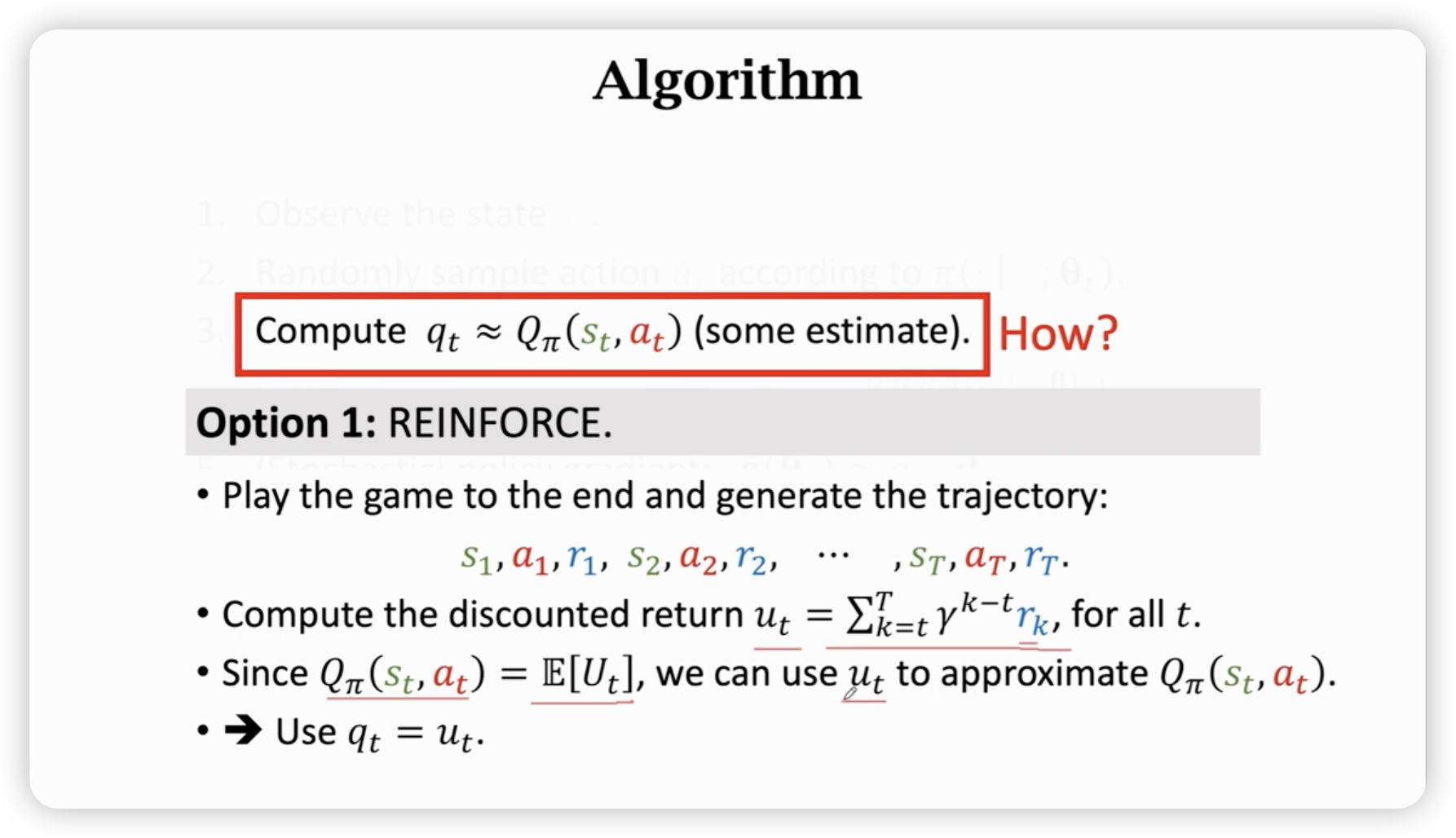
第一种方法是抽样完一次游戏,暴力去算。
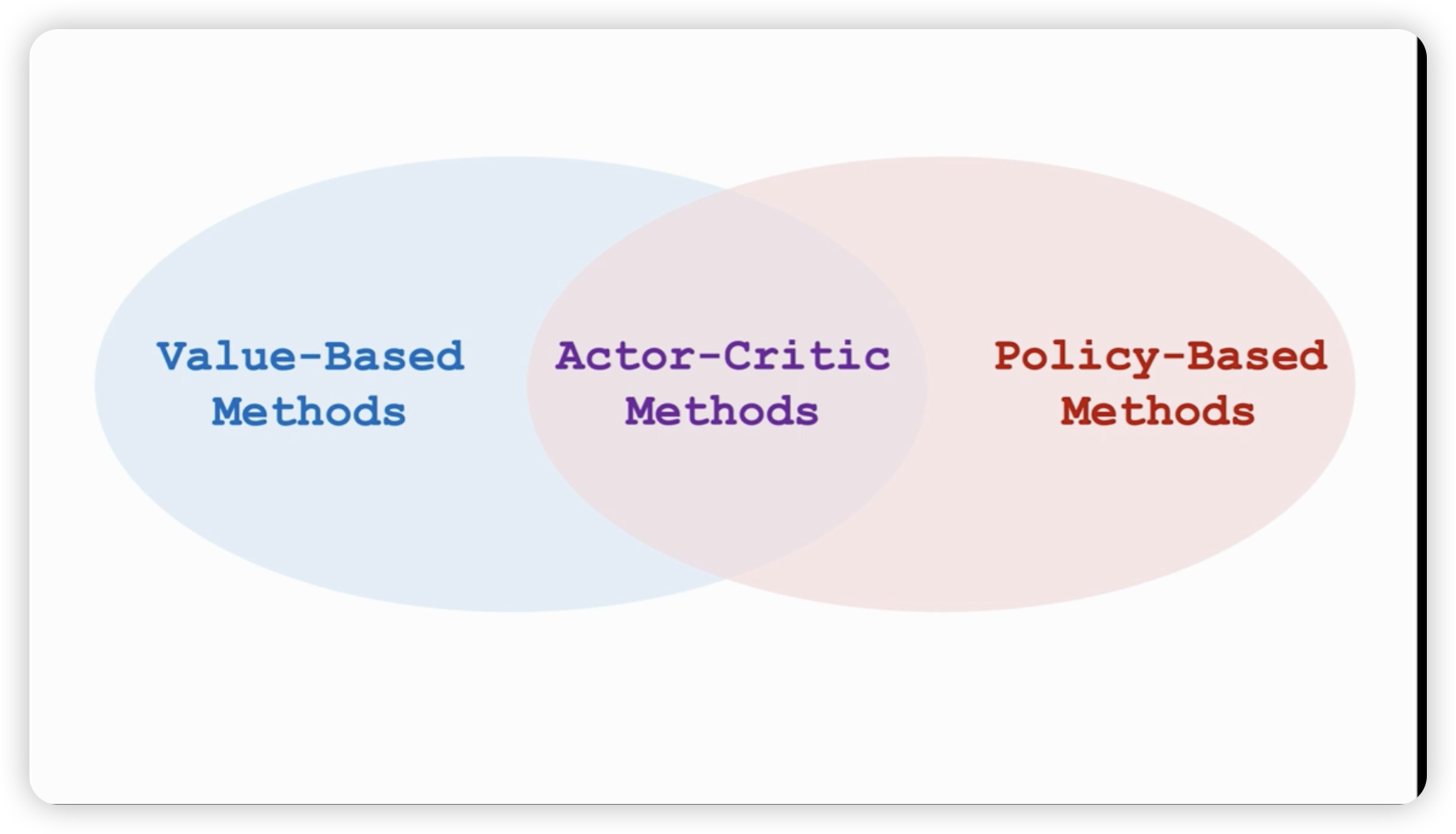
第二种方法是再用一个神经网络来近似,也就是actor-critic算法。(将价值学习和策略学习结合起来)
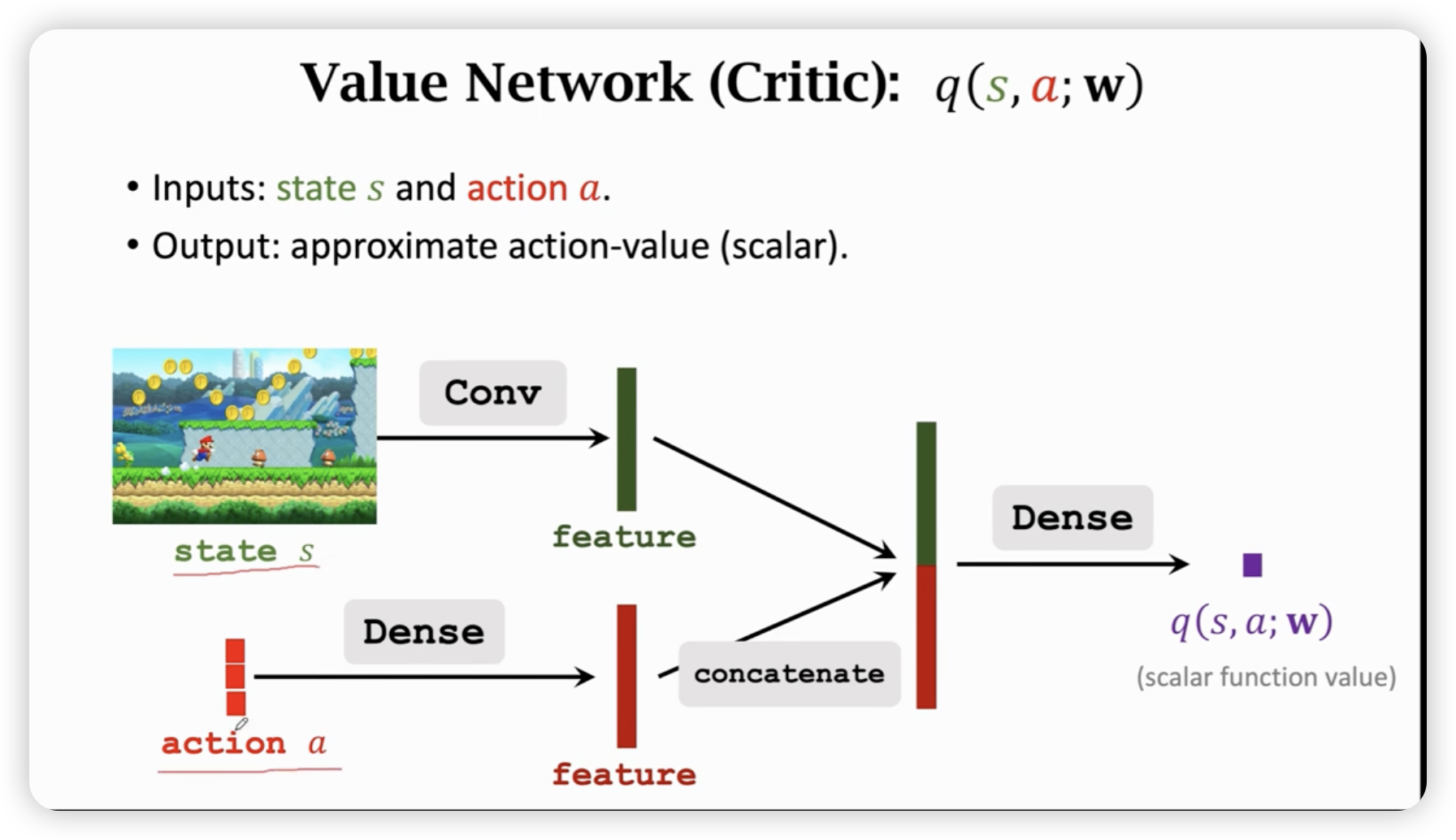
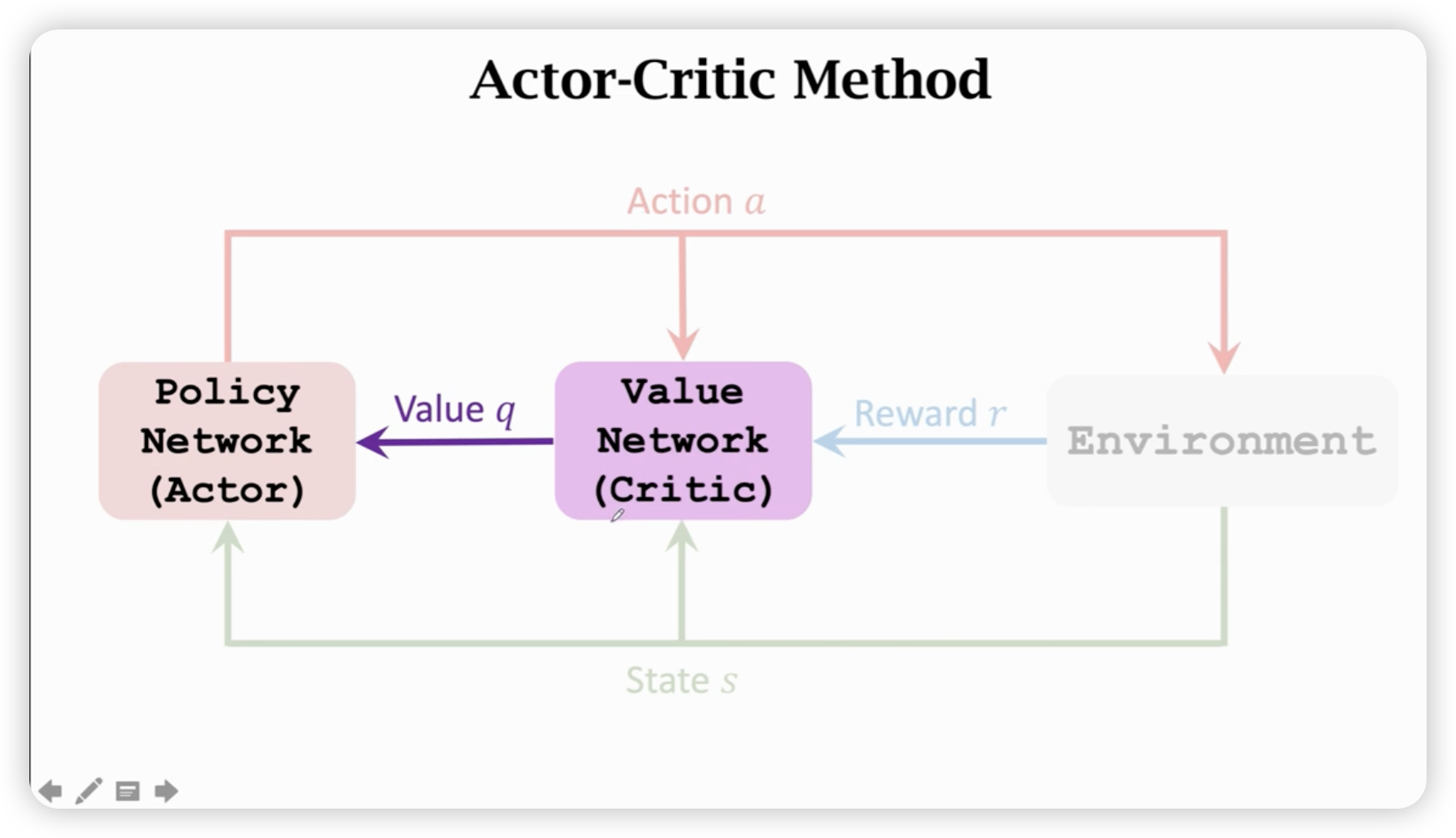
Actor-Critic Method
两个神经网络,一个负责运动,一个负责打分。(通过环境来学习这个网络)
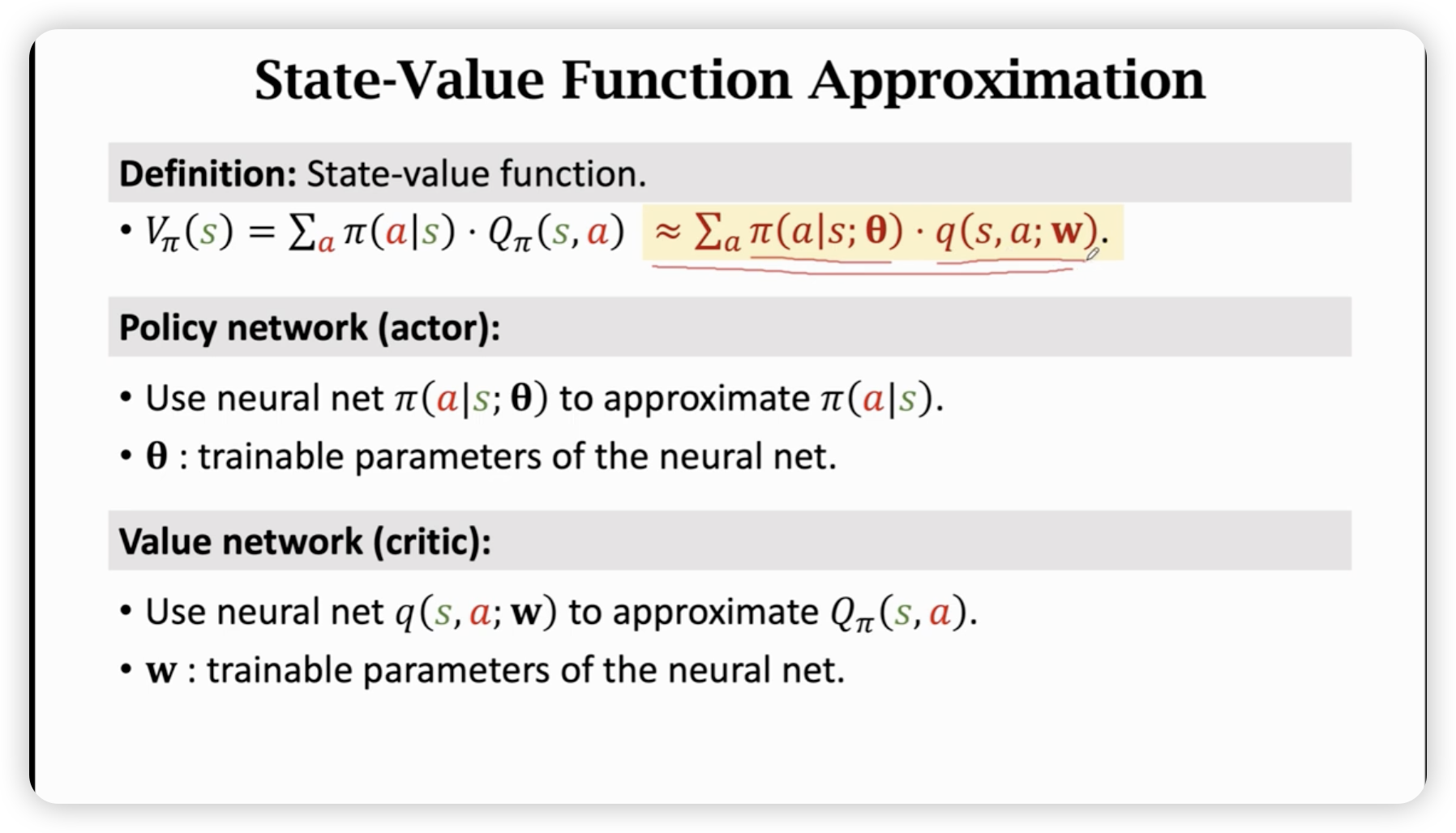
我们希望估算,但是定义式的两个东西我们都不知道,于是我们用两套神经网络分别来近似这两个东西。
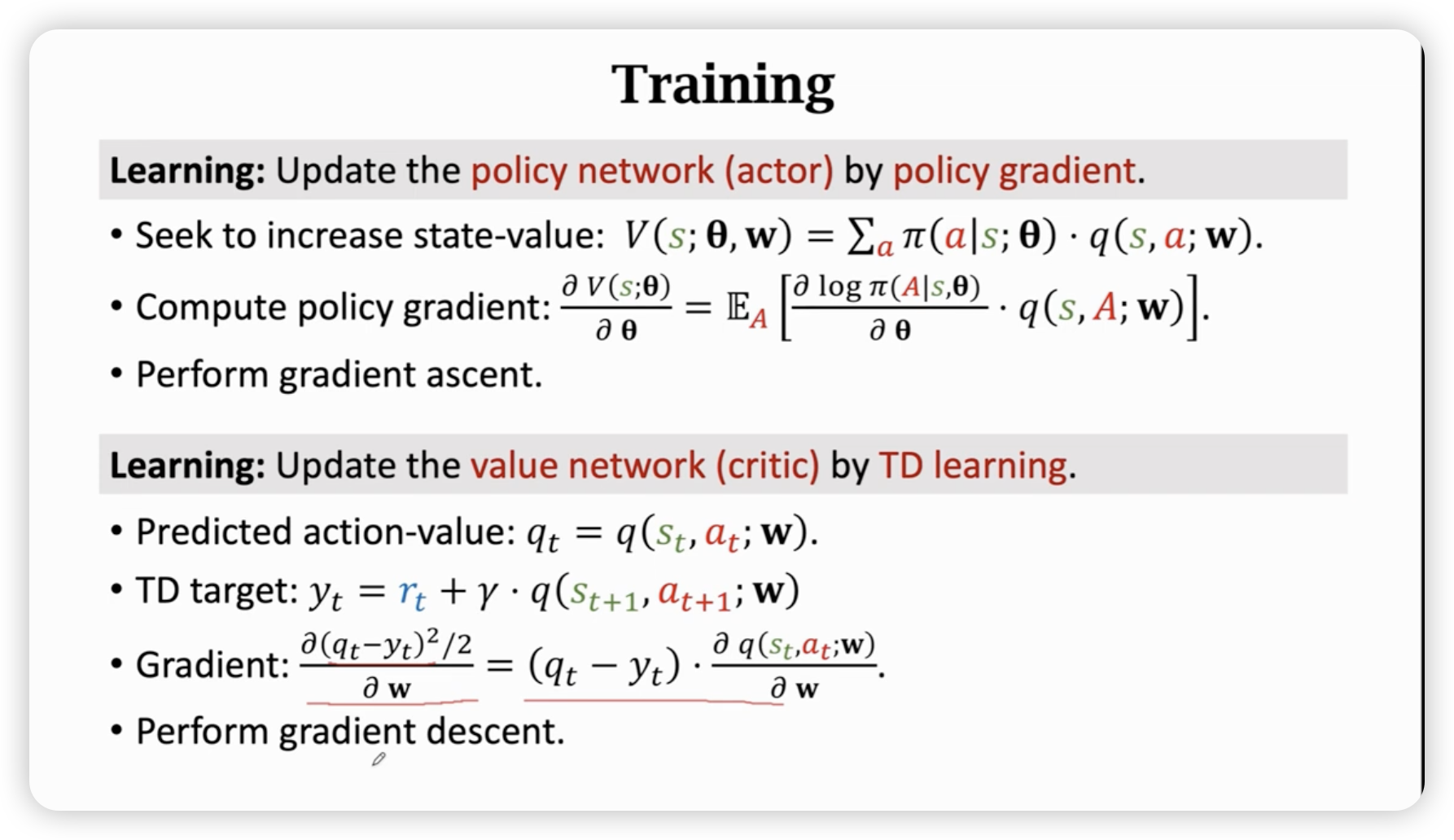
Train

策略网路依赖critic网络,critic网络依赖环境奖励。
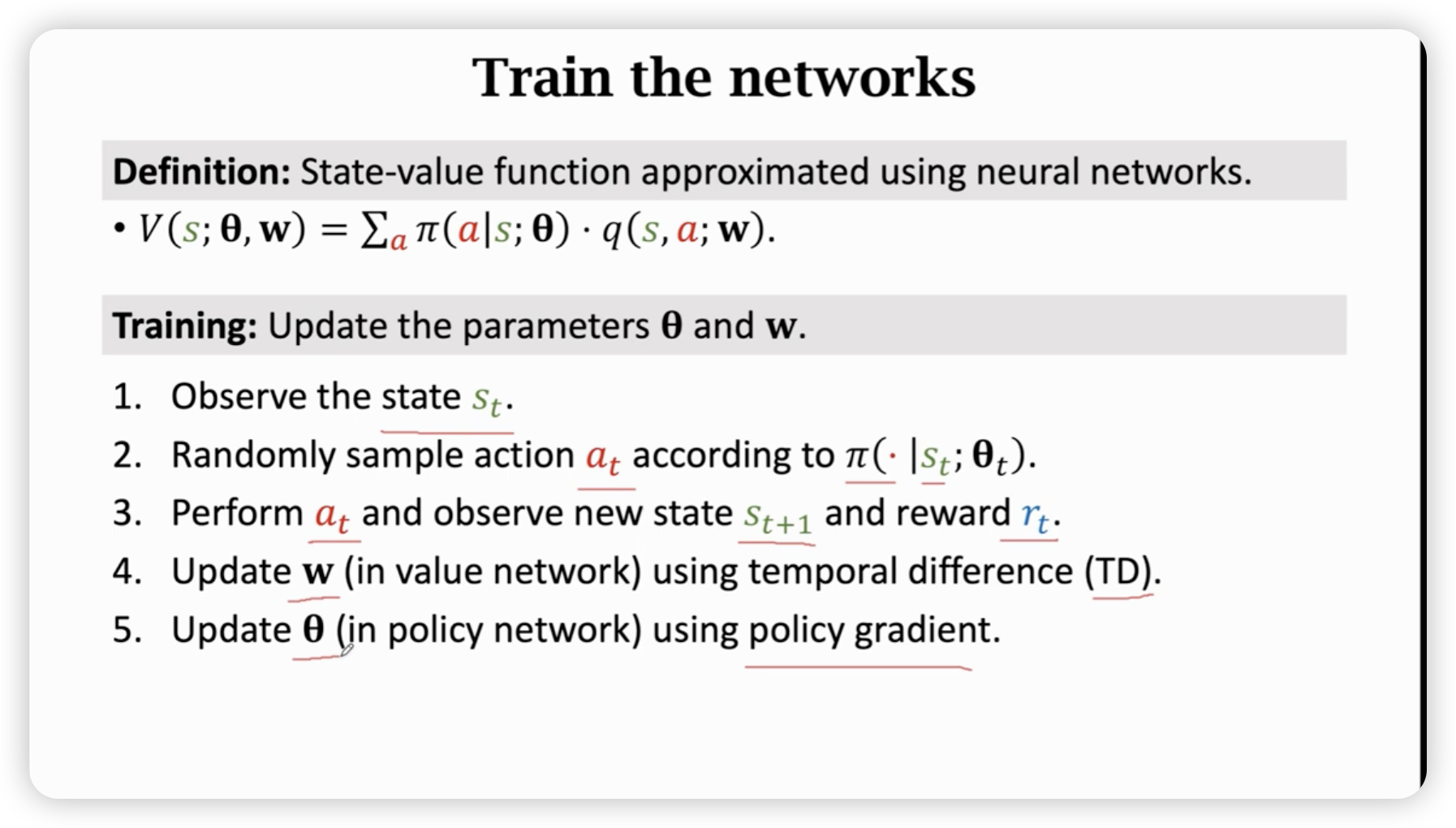
一些具体的细节:
Update value network using TD
Update policy network using policy gradient
总结一下:
Thus, one iteration is like this:
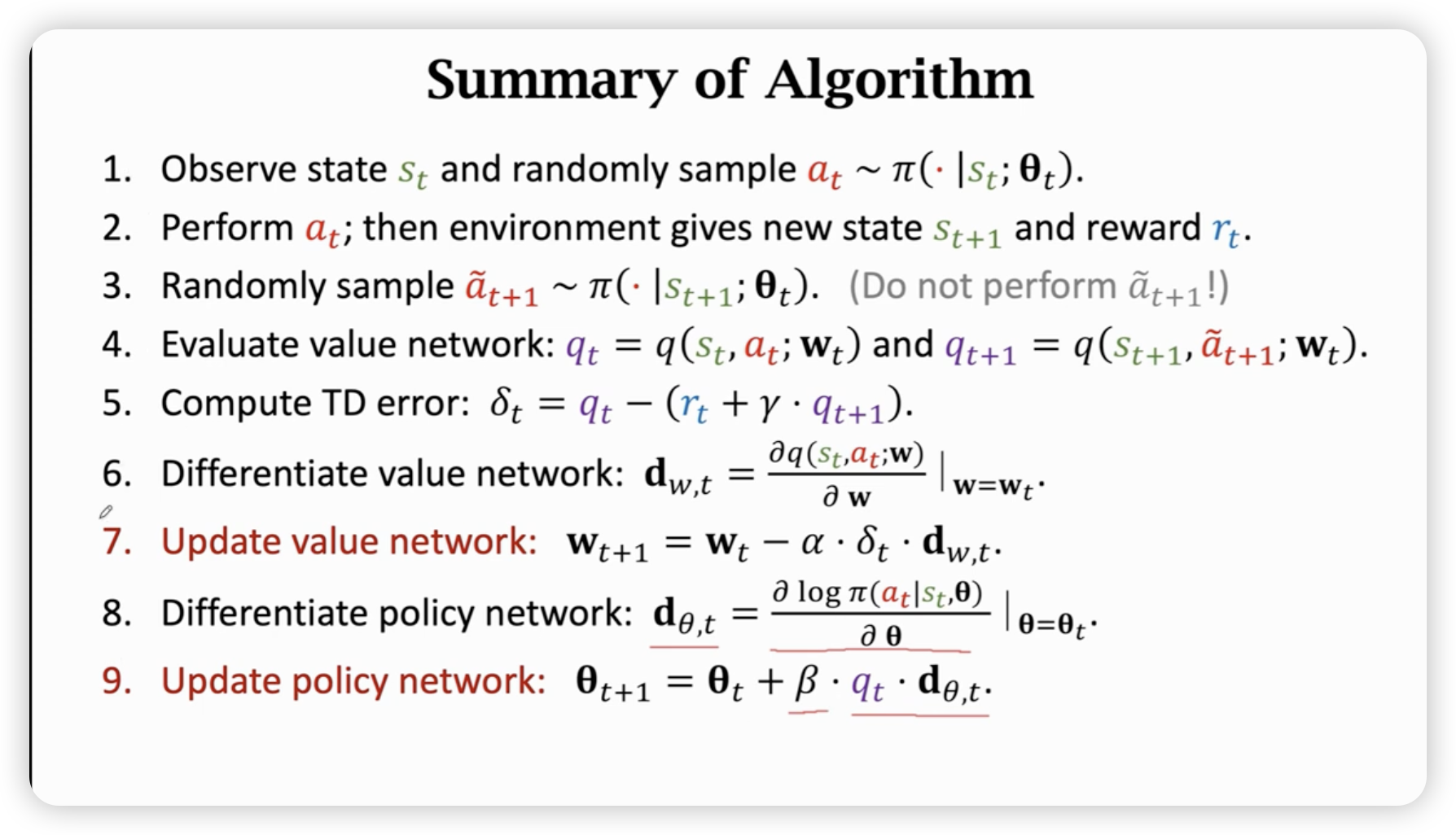
每一次迭代都只做一次动作,更新一次参数。(其中用了多次蒙特卡洛近似)
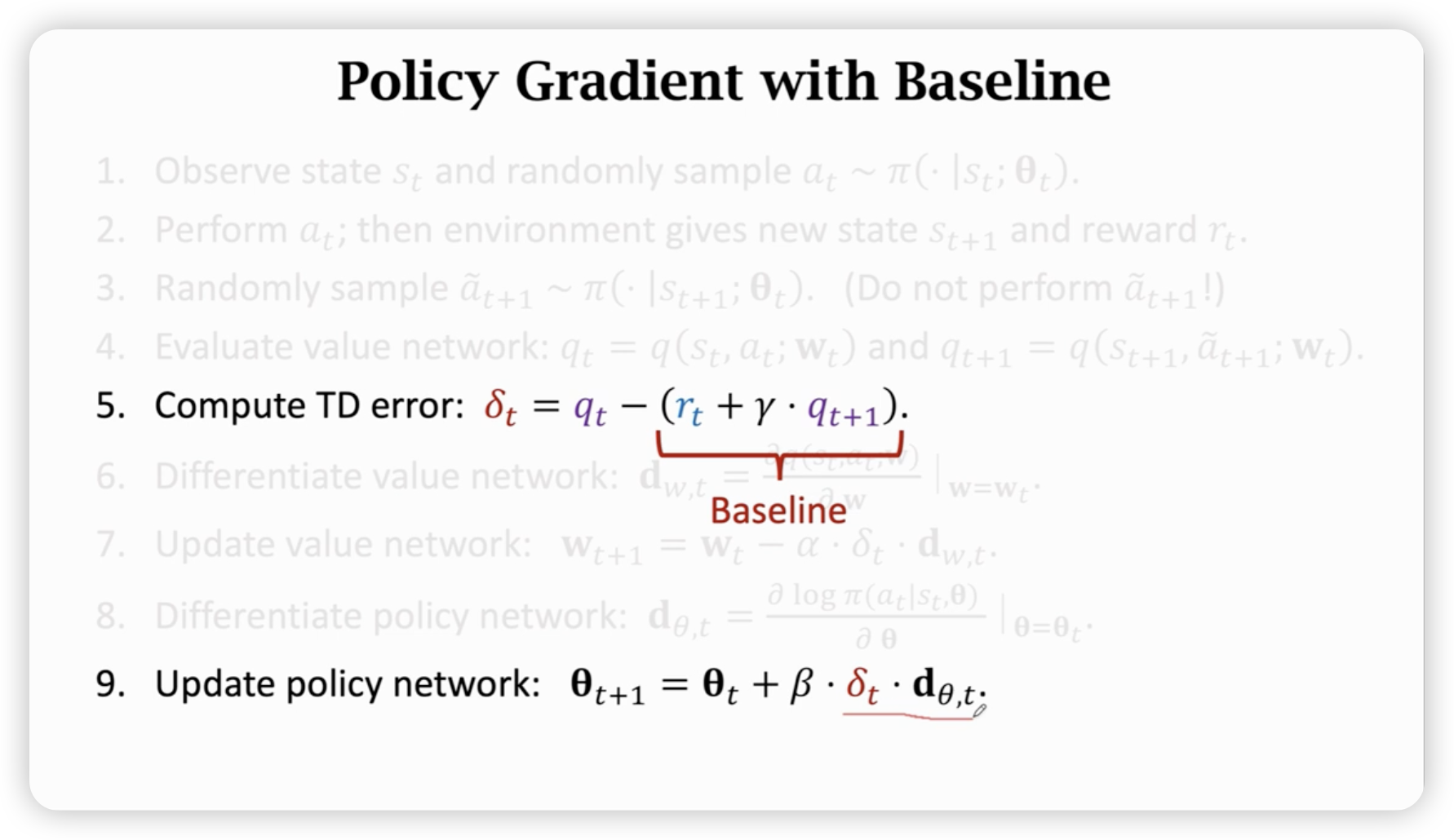
其中,如果把第九条的换成5条中的,其实期望结果没有变,但是方差变小了,收敛速度会有提升。
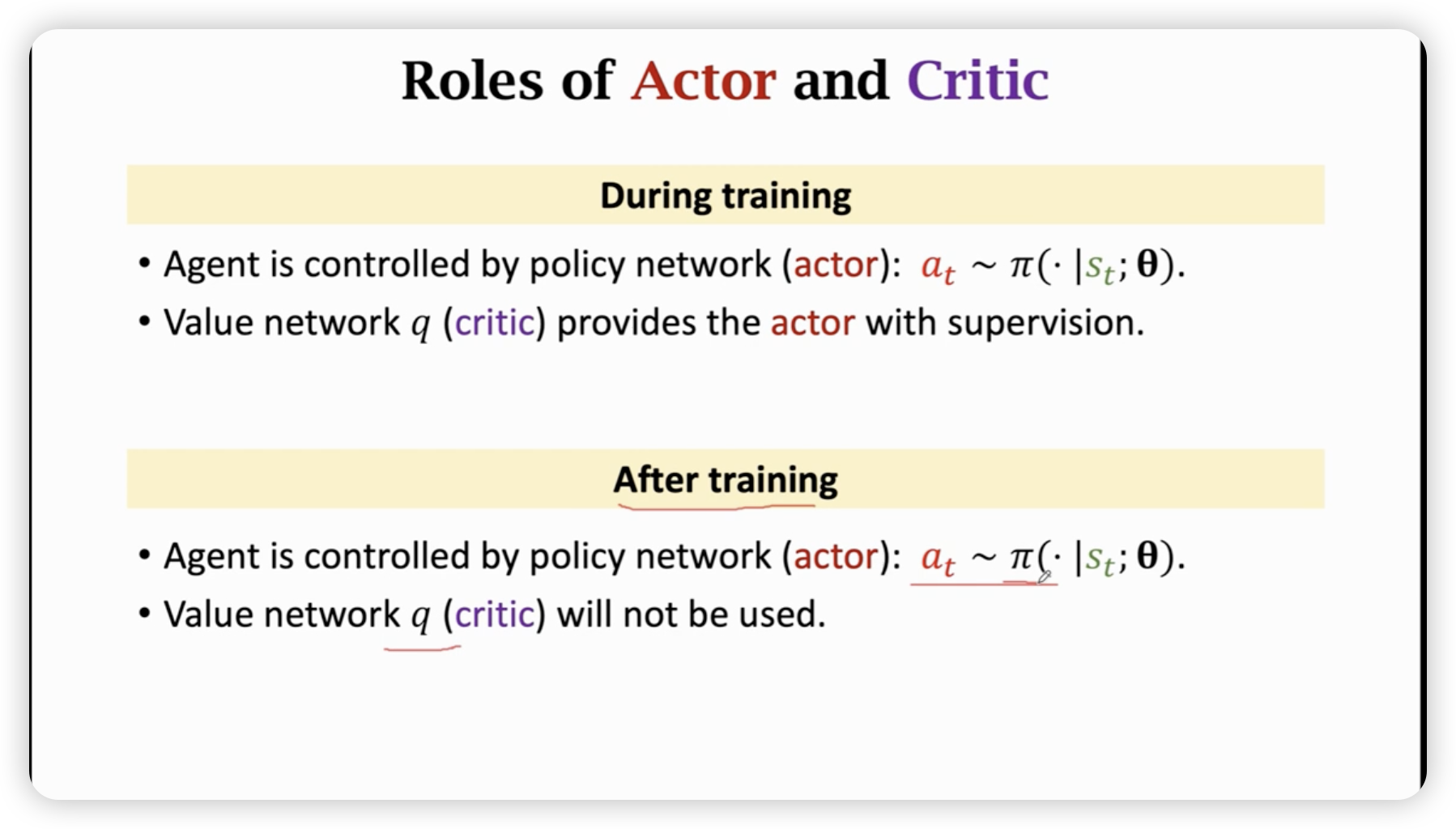
训练结束,学习完成后,就不需要裁判了。
policy network提高决策你表现。
value network依据reword让评估更准确,用来帮助决策网络的优化。