
IntroAI_HW3 "Aliens game" Lab Report
报告题目:Aliens 游戏
王崧睿 221502011 detect0530@gmail.com
2023年11月
1 引言
之前研究过一些机器学习算法,很高兴能在这次作业里学习并运用检测不同算法对该问题的适用性。
2 实验准备
Task1
2.1 任务概述:
通过学习并观察代码框架,发现我需要先完成一次游戏,再对我完成游戏中的行为的特征提取,采用surpervised分类算法,让机器学会我的操作思路和细节。
2.2 思路制定:
明确目标:要在不被炸弹炸死且不能让alien进入最后一层,同时尽可能快的结束游戏。
我发现出怪的时间间隔是固定的,如果我们能对准轴,那么我们就可以在出怪的时候炸死它们,所以第一步就是先左移然后尽可能在刷怪时就歼灭之。
而当出现漏怪的情况,我们先按兵不动,因为如果转火去追击,那么就必须放弃即将新刷出来的怪,得不偿失。但是如果停止刷怪,或者大部分怪已经刷出来了,那么就该改变策略去歼灭了。
言而总之,战术分为两个部分:
- 一开始的定点打击,旨在尽可能多的歼灭敌人。此时不会主动移动,只会不断发射子弹,同时闪避炸弹。
- 当敌人数量下降到一定地步后,追击歼灭,旨在尽快结束游戏。此时会主动移动去追击剩余的敌人,以尽快结束游戏。
2.3 示范教学局
按照上述思路打通一次游戏就行。(p.s. 这游戏手打真难
3 多种学习方法
3.1. Naive Bayes
朴素贝叶斯(Naive Bayes)算法是一种基于贝叶斯定理的分类算法,它假设特征之间是相互独立的,这是“朴素”一词的来源。
算法原理:
-
贝叶斯定理: 朴素贝叶斯算法基于贝叶斯定理,该定理描述了在已知先验概率的情况下,如何更新这些概率以获得后验概率。对于分类问题,这可以表示为给定特征(观察到的数据),我们希望计算类别的后验概率。
-
朴素假设: 朴素贝叶斯算法假设特征之间是相互独立的,这意味着给定类别的情况下,每个特征对于分类的贡献是独立的。这个假设简化了概率计算,降低了模型的复杂性。
-
条件独立性: 基于朴素假设,朴素贝叶斯分类器计算每个特征在给定类别下的条件概率,然后使用贝叶斯定理结合这些条件概率来计算后验概率,最终选择具有最大后验概率的类别作为预测结果。
感性理解:
朴素贝叶斯可以理解为一个简单而有效的分类器,其工作原理类似于一个投票系统。每个特征都投出一票,然后根据这些特征的投票来判断样本属于哪个类别。虽然它对特征的独立性作了朴素的假设,但在许多实际情况下,这种简化并不妨碍其在文本分类、垃圾邮件过滤等任务中的表现。
优势:
-
简单有效: 朴素贝叶斯算法是一种简单而有效的分类方法,特别适用于高维数据和大规模数据集。
-
快速训练: 由于朴素贝叶斯算法的简单性,它的训练速度通常比复杂模型快。
-
对小规模数据表现良好: 在小规模数据集上,朴素贝叶斯通常能够取得不错的表现。
劣势:
-
朴素假设: 特征之间的独立性假设在某些情况下可能不成立,这可能导致模型的偏差。
-
对输入数据分布敏感: 朴素贝叶斯对输入数据的分布比较敏感,如果数据与假设的分布不符,性能可能下降。
综上,朴素贝叶斯是一个简单而强大的分类算法,特别适用于文本分类等任务。在合适的场景下,它可以是一个很好的选择。
3.2 KNN
K最近邻(K-Nearest Neighbors,简称KNN)是一种基本的监督学习算法,用于分类和回归任务。该算法的核心思想是基于邻居的投票机制,即通过观察其K个最近邻的标签来对新样本进行分类或预测。
算法原理:
-
邻居选择: 对于一个未标记的样本,KNN算法计算它与训练数据中每个样本的距离,通常使用欧氏距离或其他距离度量。然后选择离它最近的K个样本作为邻居。
-
投票机制: 对于分类任务,KNN采用多数投票的方式,即将K个邻居中最常见的类别作为未标记样本的类别。对于回归任务,可以取K个邻居的平均值作为预测结果。
-
距离权重: 在一些情况下,可以根据距离的远近给邻居分配不同的权重,距离越近的邻居权重越大,这样可以使得更近的邻居对预测结果的影响更大。
感性理解:
KNN可以看作是一种基于相似性的方法,即认为相似的样本在特征空间中更加接近。当需要对一个未知样本进行分类或回归时,KNN找到与之最相似的已知样本,通过这些样本的标签或数值来预测未知样本的标签或数值。
优势:
-
简单直观: KNN是一种非常简单的算法,易于理解和实现。
-
适用于多类别问题: KNN适用于多类别分类问题,且对于类别之间的决策边界不规则的情况表现较好。
-
无需训练阶段: KNN是一种懒惰学习(lazy learning)算法,不需要显式的训练过程。模型的构建发生在预测时。
劣势:
-
计算开销大: 在预测时,需要计算未知样本与所有训练样本之间的距离,对于大规模数据集和高维数据,计算开销可能会很大。
-
对异常值敏感: KNN对异常值敏感,因为它的预测结果很大程度上取决于最近邻的样本。
-
维数灾难: 随着特征维度的增加,样本之间的距离变得更加模糊,KNN的性能可能下降。
综上,KNN是一种简单而强大的算法,特别适用于小规模数据集和相对低维的特征空间。在选择K值时,通常需要通过交叉验证等方法进行调优。
3.3 Random Forest
随机森林是一种集成学习算法,它通过结合多个决策树来进行预测或分类任务。
算法原理:
-
决策树基础: 随机森林是基于决策树的算法。决策树是一种通过对数据集进行递归划分,最终生成决策规则的算法。
-
Bagging思想: 随机森林采用Bootstrap Aggregating(Bagging)的思想。Bagging通过从原始数据集中有放回地抽取多个子集,然后分别在这些子集上训练独立的模型,最后将它们的结果综合起来。
-
随机特征选择: 在每个决策树的训练过程中,随机森林引入了额外的随机性,即每次在节点分裂时,只考虑一个随机子集的特征。这有助于增加模型的多样性,防止过拟合。
-
投票机制: 对于分类任务,随机森林通过投票机制来确定最终的类别。每个树对新样本进行分类,最后选择得票最多的类别作为最终预测结果。
感性理解:
随机森林可以看作是一群专家,每个专家都是一棵决策树。每个专家都在自己的领域有一定的见解,通过多个专家的共同努力,可以得到更为准确的预测。这就好比在做决策时,你会咨询多个专家的意见,综合考虑他们的建议来做出最终的决策。
优势:
-
高准确性: 随机森林通常在训练和测试数据上都能获得较高的准确性,即使在处理大量特征和数据的情况下也能表现良好。
-
抗过拟合: 通过Bagging和随机特征选择,随机森林对于过拟合有较强的抵抗能力,即使训练数据噪声较大,模型也能取得良好的泛化能力。
-
特征重要性: 随机森林可以评估特征的重要性,帮助理解数据中哪些特征对于模型的性能贡献最大。
劣势:
-
模型可解释性差: 由于随机森林是由多个决策树组成的,模型结构相对复杂,难以直观解释。
-
计算开销较大: 相对于单一决策树,随机森林需要更多的计算资源和时间来训练和预测。
综上,随机森林是一种强大的机器学习算法,特别适用于复杂的分类和回归问题.
3.4 Adaboost
AdaBoost(Adaptive Boosting)是一种集成学习方法,通过组合多个弱学习器(通常是决策树)来构建一个强学习器。AdaBoost的核心思想是逐步提升模型性能,对前一轮中分类错误的样本增加权重,以便下一轮中的模型能够更关注这些难以分类的样本。
算法原理:
-
基本分类器: AdaBoost可以选择任何弱学习器,但通常使用的是决策树,且每个决策树仅进行一次分类,被称为“弱分类器”。
-
样本权重: 每个样本都有一个初始权重,初始时所有样本的权重相等。在每一轮训练中,被错误分类的样本的权重会增加,使得这些样本在下一轮中更受关注。
-
弱学习器组合: 每个弱学习器都会有一个权重,该权重取决于其在当前轮中的性能。通过加权投票或加权求和来组合所有弱学习器,构建出一个更强大的分类器。
-
更新权重: 在每一轮中,样本的权重会被更新。被错误分类的样本权重增加,被正确分类的样本权重减小。
-
最终预测: 所有弱学习器的加权组合形成最终的分类器。对于二分类问题,预测结果为加权投票,对于多分类问题,通常使用加权投票或加权求和。
感性理解:
AdaBoost可以被看作是一个集体决策的过程,每个“成员”(弱学习器)都在解决问题的不同方面表现得很好。每个成员都有一个“投票”,而AdaBoost会根据每个成员的表现对其进行加权,从而形成一个强大的团队,能够在整体上更好地解决问题。
优势:
-
提高模型性能: AdaBoost能够通过组合多个弱学习器来提高整体模型的性能。
-
不容易过拟合: 由于关注错误分类的样本,AdaBoost对于噪声数据的过拟合有一定的抵抗力。
-
适用于多种学习任务: 可以用于分类问题,也可以用于回归问题。
劣势:
-
对噪声数据敏感: 对于包含大量噪声的数据,AdaBoost可能表现不佳。
-
计算开销相对较大: 由于每一轮都需要更新样本权重,AdaBoost的计算开销相对较大。
-
对离群值敏感: 对于离群值较为敏感,可能会受到异常样本的影响。
综上,AdaBoost是一种强大的集成学习算法,特别适用于处理复杂的分类问题。
4 第一次实验结果
在不对特征提取函数修改情况下,我对在#2中提到的游戏思路进行了实战并保存了特征数据。
接下来是对不同算法的实验结果:
(注:所有结果都在下进行,尽量避免结果的过拟合)
4.1 Naive Bayes
运行结果上,avater确实一开始往左走,在敌人数量下降后开始移动射击,但是走位完全是随机的,没法准确命中目标。
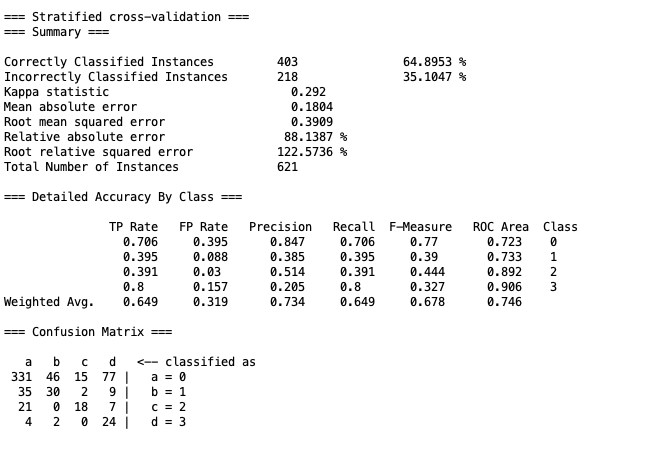
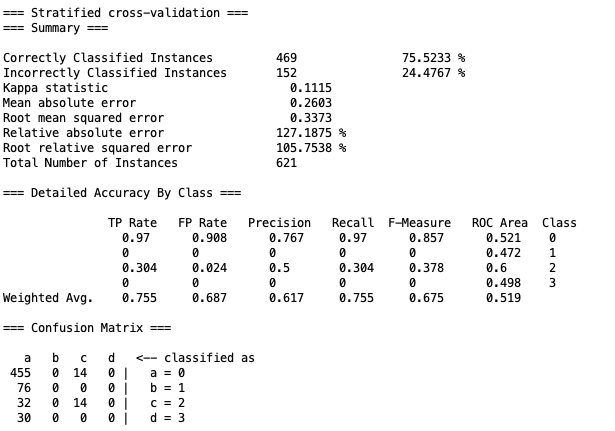
4.2 KNN
KNN的纸面数据结果比Naive Bayes好一些,正确率与误判率都有提升。
如图,仅在445tick内完成游戏,但是在这个过程中,avater却几乎不怎么走位,算法没有调控好定点射击和追击歼灭的平衡。
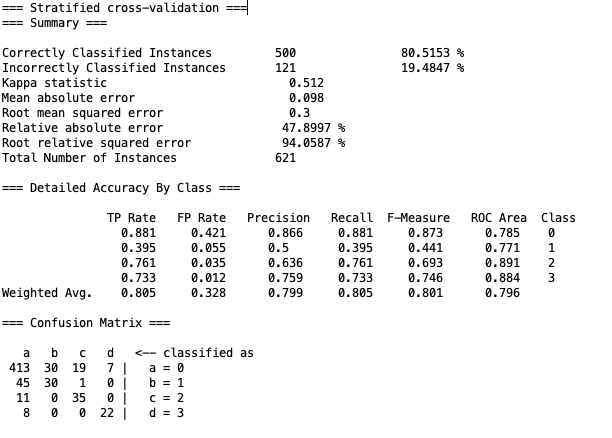
4.3 Random Forest
纸面数据又有提升。
但是实际结果又走向另一个极端,过早的进入歼灭追击模式,但精度不够,导致游戏时间过长。
4.4 Adaboost
结果依然不好,一开始直接左移到头,然后就一直发射弹药不动了。
4.5 第一次实验总结

| 算法 | 定点打击 | 追击歼灭 |
|---|---|---|
| Naive Byes | OK | 随机打不准 |
| KNN | OK | 几乎没有 |
| Random Forest | 没有 | OK |
| Adaboost | OK | 完全没有 |
可以看到学习算法都无法完美学习到我的游戏战术,究其原因,可能是数据样本太小,或者是特征提取函数的问题。
同时注意到实验中avater很难学习到如何躲避炸弹,其原因很可能是在训练中很少有垂直炸弹我去躲避,即使有,次数也很少相应的权值也太低了,所以avater也学不会这个行为。
5 算法改进
鉴于架构原因,我无法扩增数据容量,所以我决定改进特征提取函数,解决上述提出的各种问题。
具体来说,分为以下两点改进:
-
追击歼灭时,为了防止其随机走动,我添加三个特征,分别是:是否有敌人在左侧,是否有敌人在右侧,是否有敌人在正前方。这样avater就可以根据这些特征来决定走位,而不是随机走动。在我的示范里我会尽量维持敌人左右均衡的状态,这样avater就会在左右移动中寻找更佳的射击位置。
-
躲避子弹,设置boolean类的特征,表示当前位置上空是否有炸弹,是的话赋值为100,反之为-100,同时训练时只要上空有炸弹我就尽快躲避,尽可能多得保持上空无炸弹也即boolean为false的状态,这样学习后可以有效避免被炸弹炸死的情况。
同时为了增加为设置的特征向量的比重,为将上空是否有炸弹的特征向量的比重提高到100,左右上的敌人数比重提升至10,这样可以强化特征学习。
1 | public static double[] featureExtract(StateObservation obs){ |
6 第二次实验结果
以下所有实验均在cross-validation : 10下进行。保证不会太过拟合且样本数也得到保证。
所以纸面实验数据肯定不如全部作为training set优秀,但是实际结果却更加稳定,更与纸面数据相符。
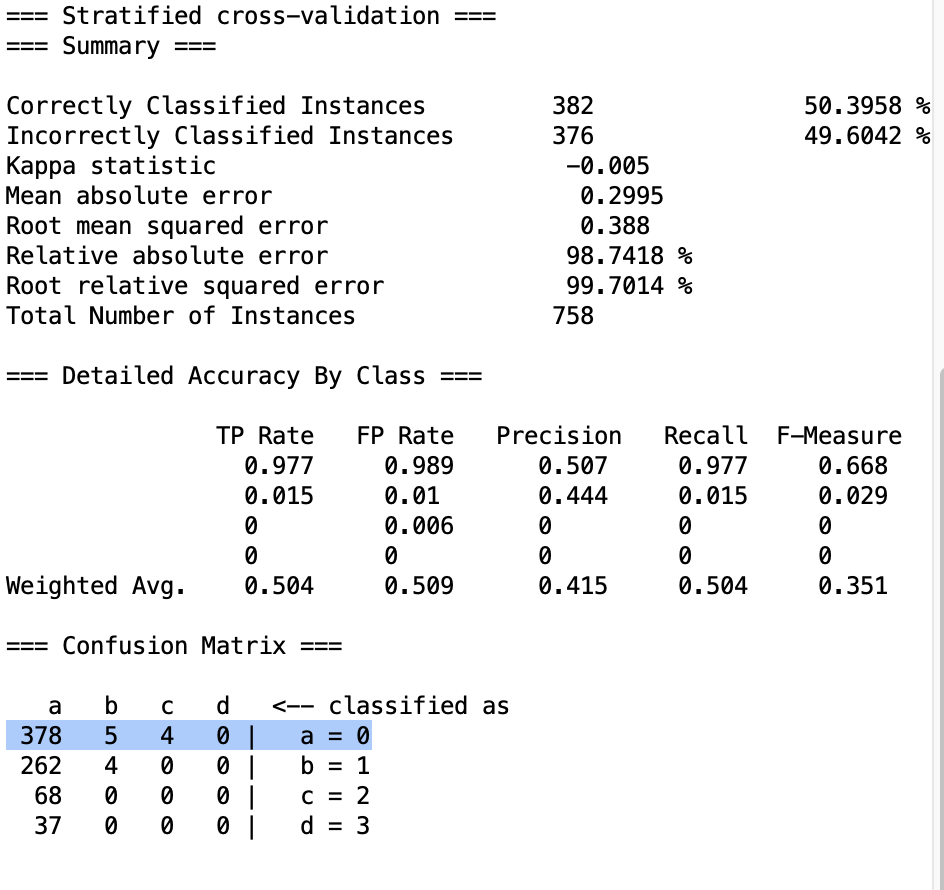
6.1 Naive Bayes
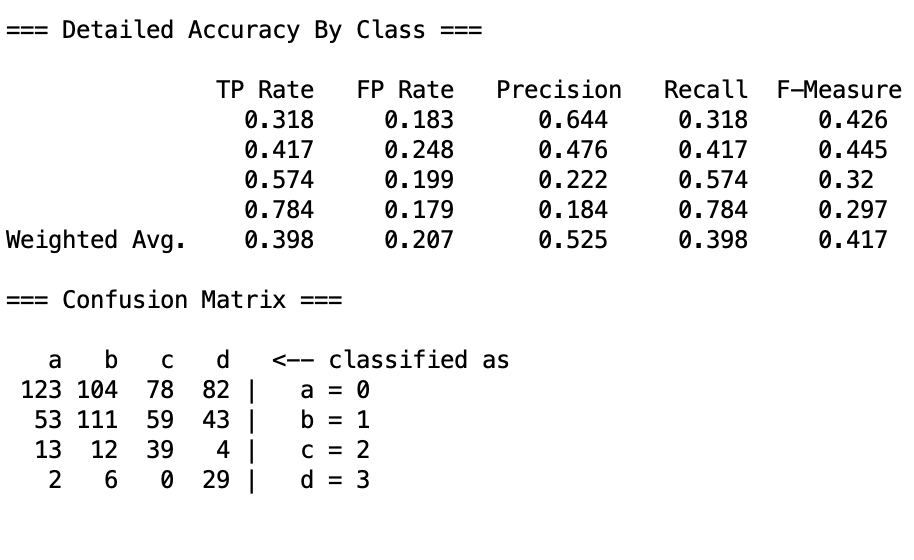
结果反而更佳糟糕,这是因为Naive Bayes算法的特征独立性假设且过于简单,导致其无法学习到多个特征之间的关系,所以这种改进对Naive Bayes算法无效。
具体结果中,会呈现出不确定性,没有学习到重要特征。
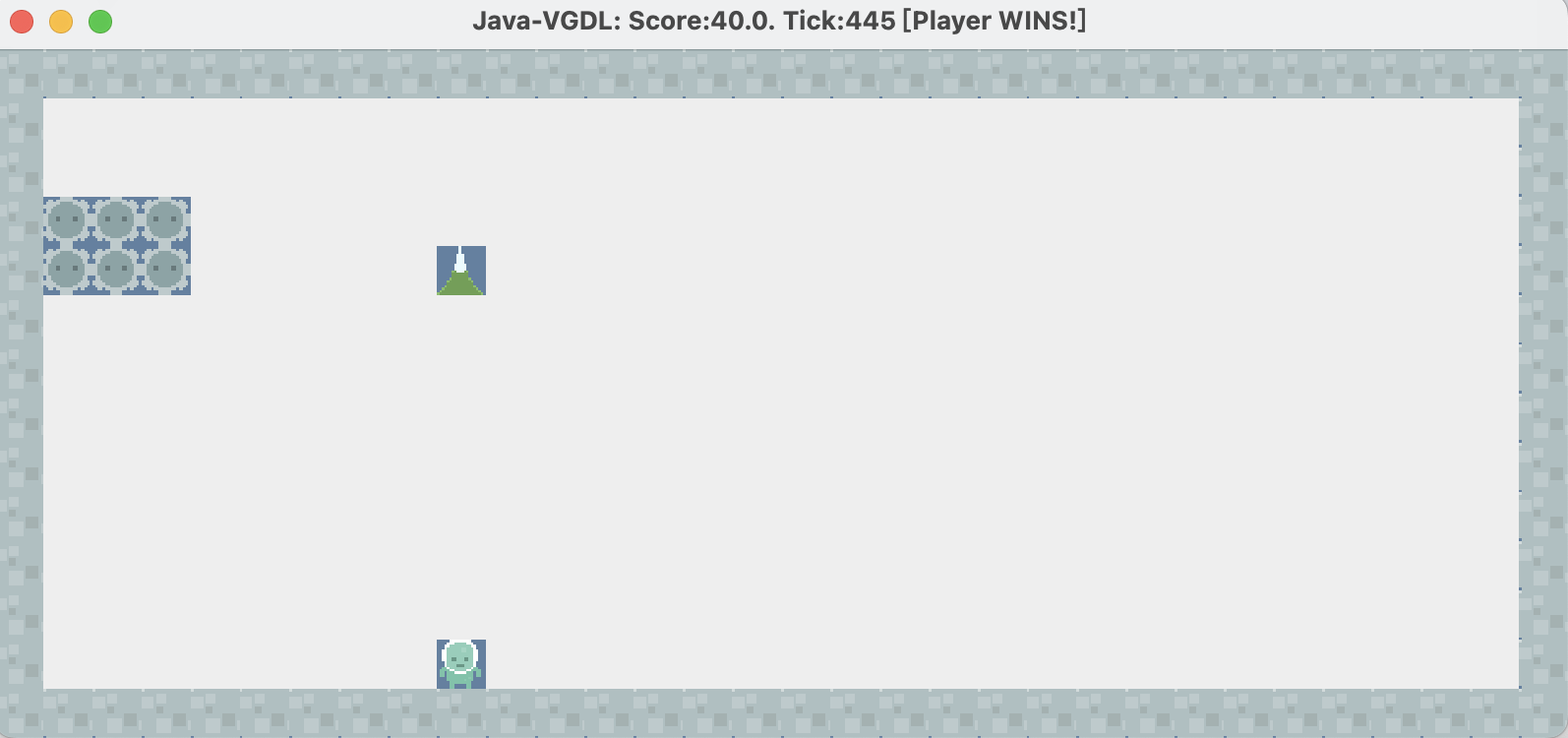
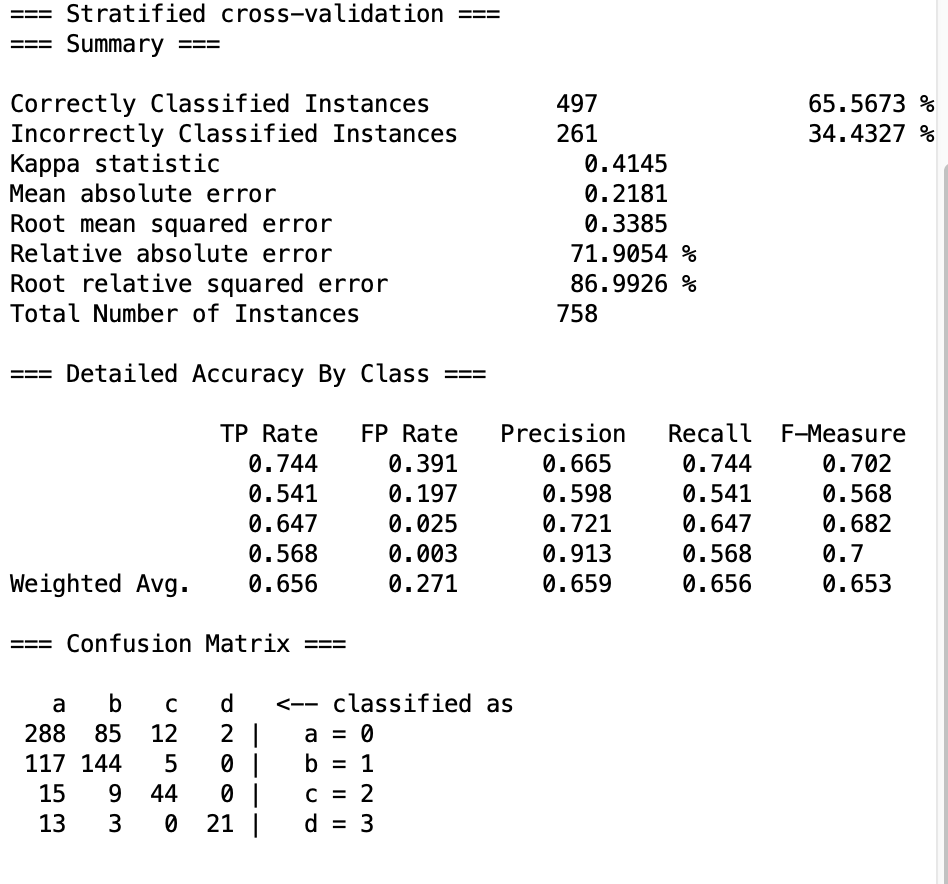
6.2 KNN
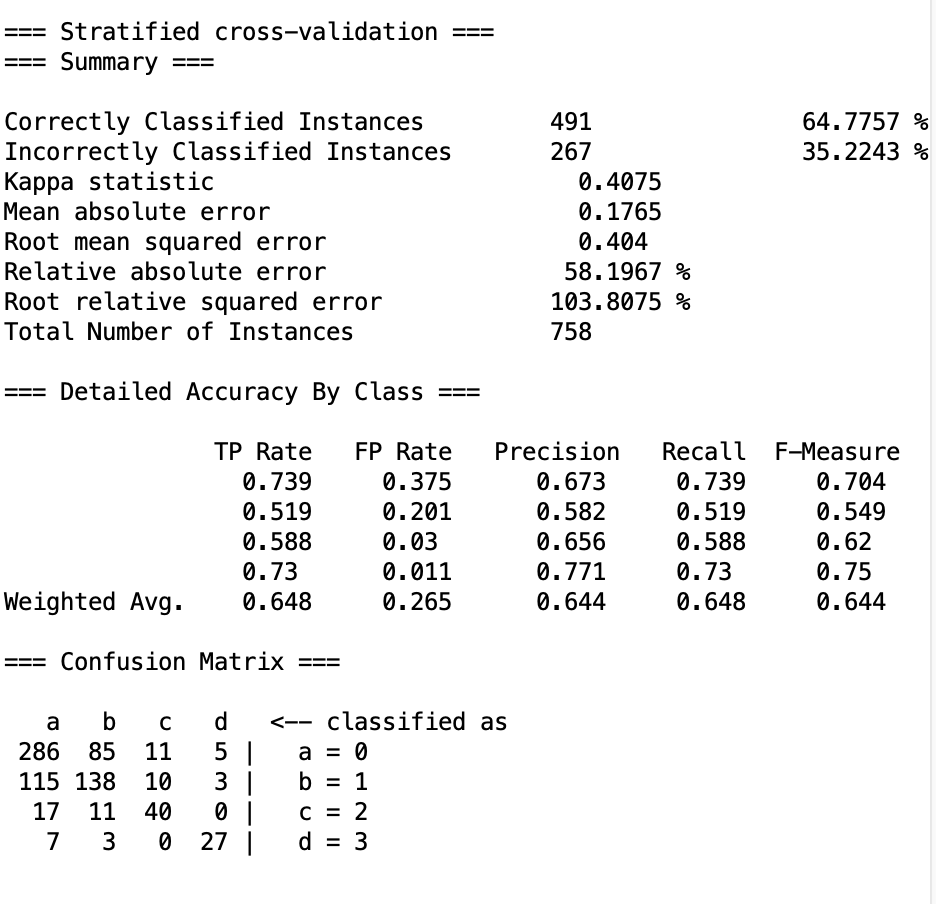
当设置 时,纸面数据与第一次相比提升不大。
但是惊喜的是,实际结果却有了很大的提升,avater可以在不被炸弹炸死的情况下,尽可能快的歼灭敌人。
具体而言,avater学会了:
- 一开始左移持续射击,然后在敌人数量下降后,开始追击歼灭。
- 追击时方向准确,不会往没人的一边跑
- 有炸弹时早早避开
当时:
纸面数据有了提升,同时实际表现与K=1时相差不大,但是实际表现更加稳定,所以我选择作为最终的。
大概在450tick左右可以完成游戏。
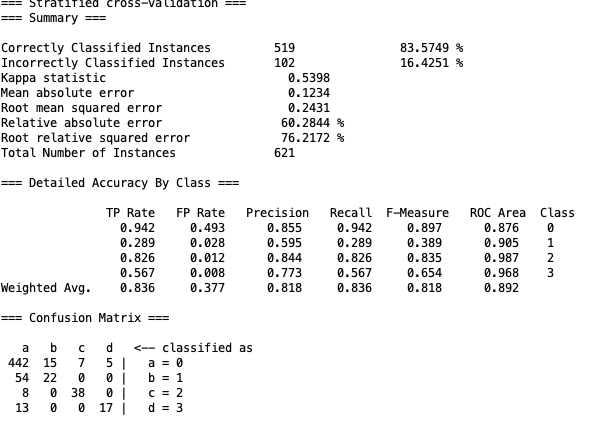
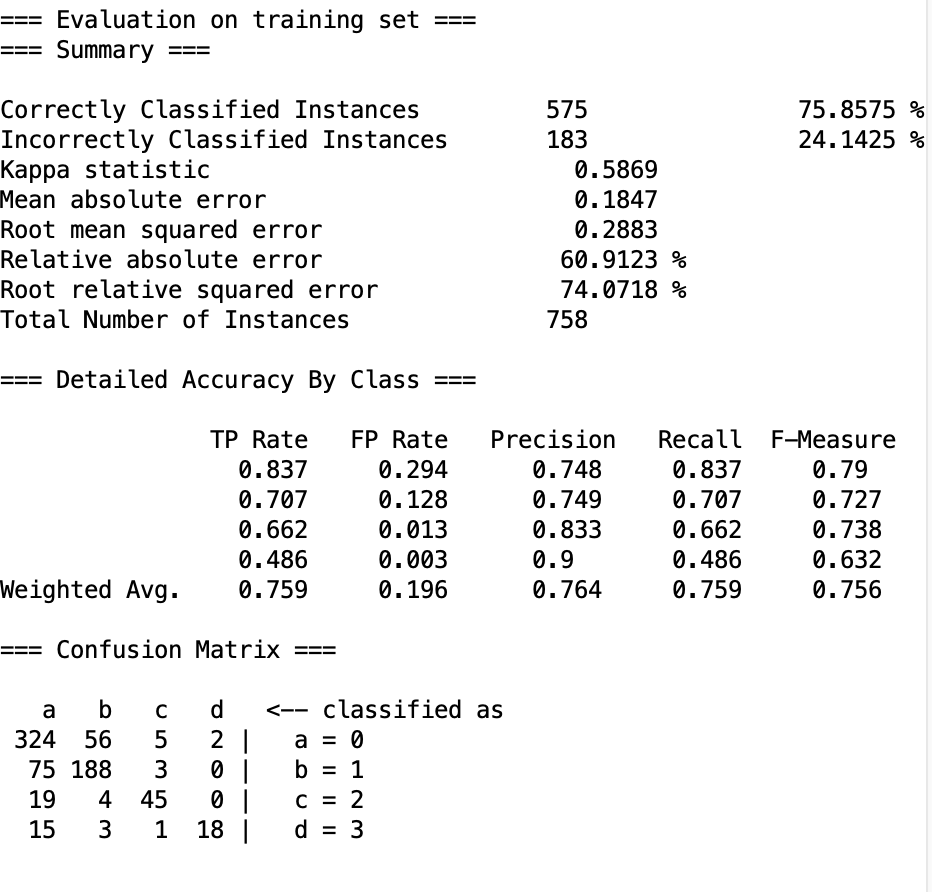
6.3 Random Forest
数据表现差异不大,
实际实验时呈现三段式表现:
- 一开始左移定点射击表现不错
- 而后追击歼灭模式表现也还行
- 但当敌人数量下降至三以内时,会贴边不动了。
所以耗时较长。
6.4 Adaboost
就实验数据反而是负提升,实际结果也不好。
会在一开始左移,然后不动了。
6.5 第二次实验总结
| 算法 | 定点打击 | 追击歼灭 |
|---|---|---|
| Naive Byes | 随机 | 随机 |
| KNN | OK | OK |
| Random Forest | OK | 不完全OK(最后又会不动) |
| Adaboost | OK | 完全没有 |
在第二次实验中,KNN算法表现得最好,随机森林算法提升,朴素贝叶斯学习失败,Adaboot算法只关注了一种策略。
与第一次实验相比,KNN和随机森林有进步,但是朴素贝叶斯和Adaboost算法反而退步。
7 总结
本次实验,我将之前学习过的四种常见分类算法应用到了Alien游戏中,通过对游戏的分析,提出了一种游戏策略,并通过特征提取函数将游戏中的行为转化为特征向量,然后通过四种算法进行学习,最后通过实验结果对算法进行评估。其中KNN算法经过特称提取优化后表现十分亮眼,可以在不被炸弹炸死的情况下,尽可能快的歼灭敌人。(选择超参数K=5,可以在450tick左右稳定通关游戏) 其他算法则或多或少没有学习到战术,有的过拟合,有的则两种战术没有达到平衡。
以上。