
SAC
SAC
detect0530@gmail.com
Problem to be solved
- policy梯度那里,Z为什么能忽略。以及梯度加法那里。(泛函杀我)
- SQL数学上和SAC区别
SAC’s background
SAC主要解决的是连续动作空间的控制问题,在我们一探SAC究竟之前,让我们先回顾SAC之前解决连续动作控制问题的两个主流算法:DDPG,PPO。
DDPG
DDPG是基于DPG(Deterministic Policy Gradient)的算法,我们接着先从DPG说起。
DPG
-
引入AC(actor - critic)框架,让值函数直接指导策略优化。这里有必要提一下,是因为DPG与之前的PG算法有本质的不同:
过去的PG算法使用累计收益(需要真的去模拟,做蒙特卡洛估计)作为目标,调整策略以追求更高的收益。
而DPG则是利用critic(Q函数)找到可能得最优策略,随后直接依靠Q值去优化策略函数,也就是说策略的调整完全不用依靠实际收益。 -
DPG的核心公式:
利用critic直接优化actor,上述公式利用Q值调整策略函数;Q值则用TD-error类似Q-learning的方式更新。
依靠Q值寻找最优策略:
对于状态s,我们要做的是调整a,找到一个最优的动作使得最大,这里是动作连续情况,可以对a求导的。
优化当前策略:
我们有了最优动作,只需要让policy network做出的决策和我们预测的最优解尽可能对齐即可。
- DPG杂谈:
- 实际上根据上述核心式子,策略选择和策略优化可以在一个式子里体现。最初的时候,actor和critic都很拉胯,但是随着actor与环境交互的进行,critic经过和TD-error的对齐训练逐渐准确,actor也会根据critic提供的值函数逐渐向最优策略靠拢。
- 在为policy network更新时,
需要$\theta对动作a的导数,所以DPG要求动作空间连续。(反过来说明DPG不适用于动作空间离散的任务)
- 纵观DPG流程,其实critic才是核心core,策略的好坏(actor)完全取决于critic的值函数是否估得准确,导致整个DPG算法实际与value-based算法更加接近。这为DPG带来一个优势:可以更好的利用过去的数据,也即可以支持off-policy,因为critic自然可以更多地利用过去的数据)
好了,聊完了DPG,我们回过头看看包括DDPG在内的几种衍生做法:
- DDPG: 加上了几个小技巧,比如target network,replay buffer等,使得DDPG更加稳定,更容易收敛。
- D4PG:引入分布式的critic,并使用多个actor(learner)共同与环境交互)
- TD3:(参考了double Q-learning的思想来优化critic,延缓actor的更新,计算critic的优化目标时在action上加一个小扰动)
PPO(Proximal Policy Optimization)
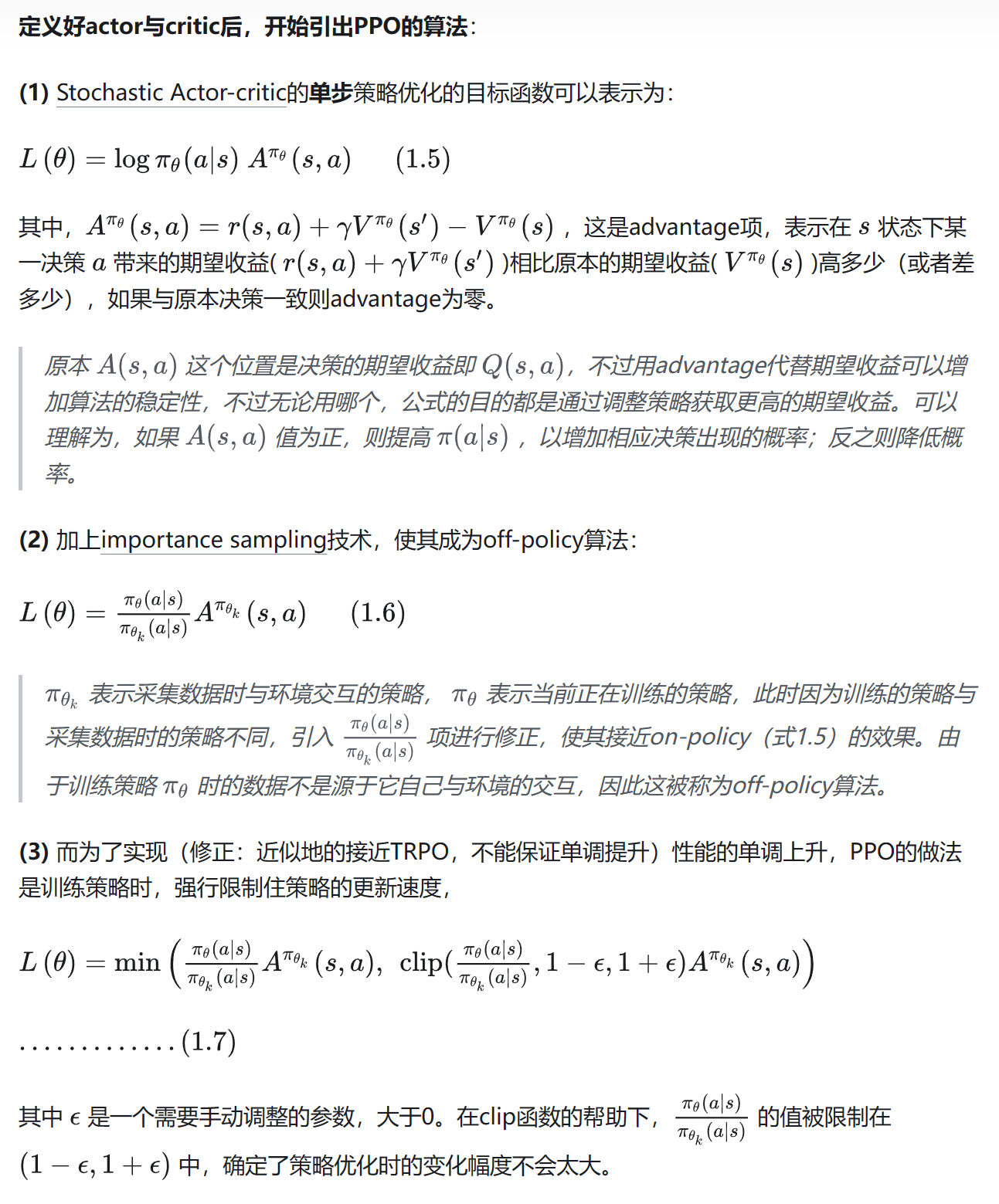
PPO是TRPO(Trust Region Policy Optimization)的简化改进版,二者的共同目标都是:在PG算法优化过程中,使性能单调上升,并且使上升幅度尽可能大。
PPO同样是AC框架,不过比起DPG更接近传统的PG算法,智能体agent每次决策时都要从策略函数输出的分布中采样,得到的样本作为最终执行的动作,因此天生具备了一定的探测环境能力,不需要像DDPG为了探索环境主动给决策加上扰动。与DPG家族不同的是,PPO重心放在actor上,仅仅将critic作为预测状态期望收益的工具,策略的调整基于获取的收益,而不是critic的导数。(这一点很关键,需要细细评味)
-
PPO具体的流程可以参考我的另一篇PPO_blog。
-
也可以参考这个截图:
-
PPO杂谈:
- PPO与原始PG算法不同在于,每次策略参数迭代都朝着优化的方向改进,同时将策略变化限定在一定范围以内。(反之更新后策略崩溃,提高稳定性)
- 引入importance sampling技巧,成为一定程度上的off-policy算法。(on-policy对数据依赖很严重,每次更新都需要和环境进行新的交互)
- 引入AC框架,可以用critic代替蒙特卡洛实际去和环境交互计算return。同时可以利用critic计算advantage优势函数。
- 使用GAE,replay buffer等技巧,使得PPO更加稳定,更容易收敛。
- 严格约数policy参数更新速度,使策略表现尽可能单调。
主流算法的缺陷
- PPO:PPO必须保证importance sampling实现的off-policy与实际环境交互policy差异不会过大,否则,过去的数据不能再被利用,这样的off-policy其实是半吊子,所以PPO在sample efficiency 这条指标上并不算好。
- DDPG: DDPG对各种超参数十分敏感,所以DDPG在各种指标上的亮眼成绩有精雕细琢的嫌疑。泛化性能堪忧。
SAC
为了解决上述经典算法的问题,Tuomas Haarnoja 提出了他的SAC算法,接下来我们正式引入主角SAC。SAC是基于最大熵(maximum entropy)这一思想发展的RL算法,其采用与PPO类似的随机分布式策略函数(Stochastic Policy),并且是一个off-policy,actor-critic算法,与其他RL算法最为不同的地方在于,SAC在优化策略以获取更高累计收益的同时,也会最大化策略的熵。SAC在各种常用的benchmark以及真实的机器人控制任务中性能优秀,而且表现稳定,具有极强的抗干扰能力,是2018年强化学习领域的巨大突破。
为了更好的引入SAC,接下来会介绍一些前置知识,包括SAC由来的一步步过程。
熵
熵越大,代表混乱程度越高,不严谨地说,熵越大,代表策略越随机,这样agent可以更充分地探索状态空间,避免策略早早陷入local optimum,并且可以探索到多个可行方案来完成任务,提高鲁棒性。
引入熵最大化的RL算法的目标策略:
这里是策略下的状态动作对所服从的分布。是温度系数的超参数,用于调整对熵值的重视程度。
乍一看,就是给奖励后面加了一个正则熵值项,
不过,MERL的优化目标不只是灵机一动地给原本的RL目标加上一个正则化项,这个优化目标可以从概率图模型(Probabilistic Graphic Model)推出,感兴趣的读者可以参考SVI。
而SAC的作者则表示这个思路源于统计建模中的最大熵方法,最大熵模型的好处是:模型在匹配观察到的信息时,对未知的假设最少。
------此处有两个链接
Soft Value Function and Energy Based Policy
由于我们的优化目标变了,在MERL(Maximum Entropy Reinforcement Learning)中我们也有自成一派的值函数,用于评价策略和状态的好坏。
- Soft Value Function:
不难注意到soft Q和soft V之间存在关系:
(其实上式就是SAC中V函数的值迭代公式)
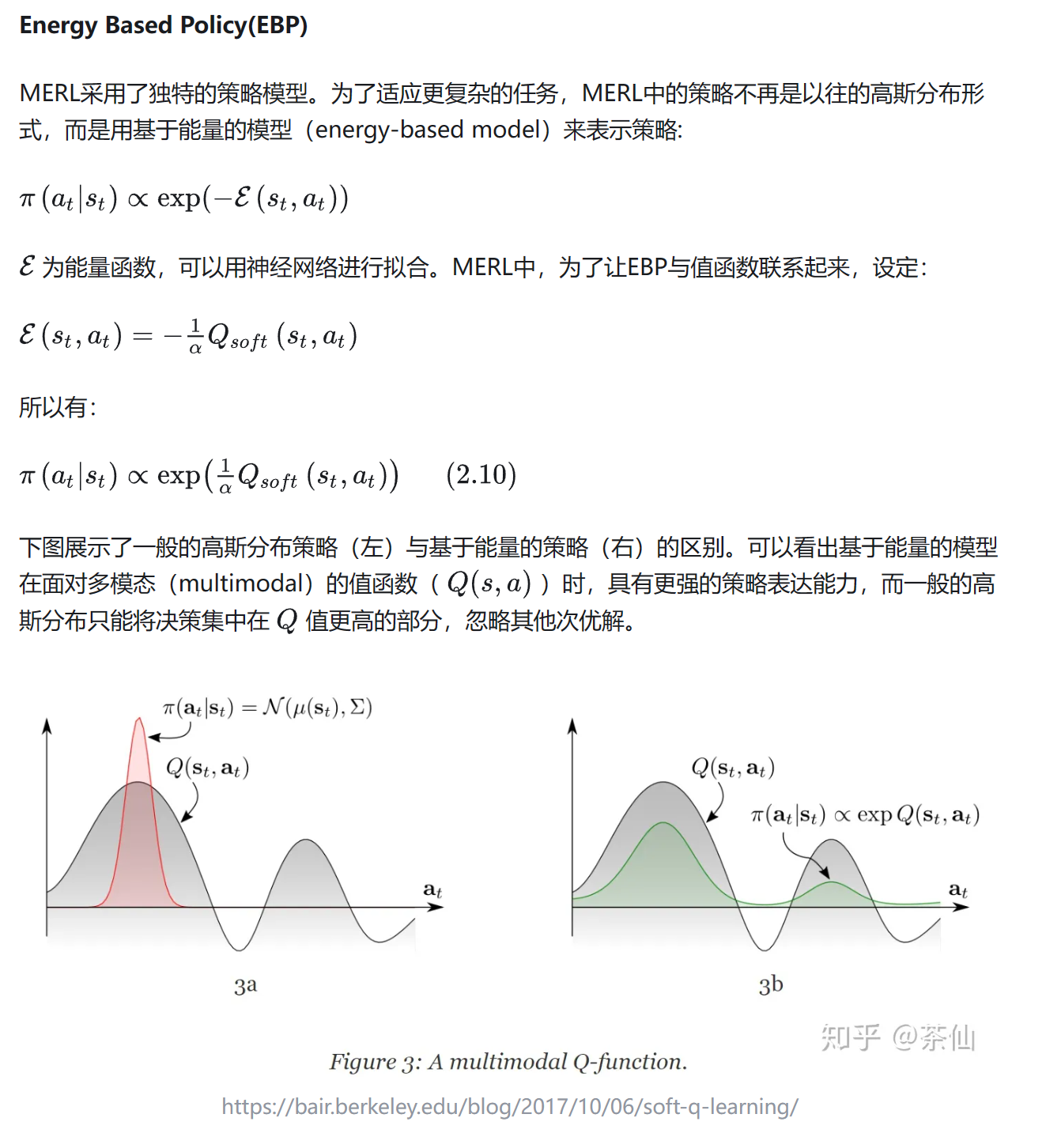
Energy Based Policy(EBP)
SAC的前身Soft Q-Learning
SAC
前文提出了MERL的基本理论,并引出了SAC的前身Soft Q-Learning,不过我们也可以看出其实现困难,最终的实现也是理论上soft Q-learning的近似。后来 Tuomas 改进优化了SQL,提出了SAC算法。
Soft Policy Evaluation
Soft Q-Learning中我们需要对V函数的值用softmax积分去算,这一步很难,我们采用迭代的思想规避这个问题。
如果SAC中我们只打算维护一个值函数Q,就把下式代入,只用Q值函数迭代;如果想维护两个值函数Q和V,那就用这两个式子进行迭代。。
这里的s是从经验池D中取的,存放的是同轨策略分布的样本。
用这两个式子反复迭代,可以得到近似的策略评估(值函数)。
Soft Policy Improvement
SAC中的理想策略依然是EBP形式
,不过由于EBP无法采样的问题依然存在,所以只能用一个高斯分布来代替EBP与环境交互,随后策略优化时我们期望这个高斯分布尽可能接近EBP。
于是很直观的,我们用KL-divergence来度量和EBP之间的距离,并优化缩小这个距离:
解释一下,表示我们可选的策略集合,本质上就是带参数的高斯分布的集合。是归一化因子,用于保证是一个概率分布,不过对于策略函数来说,这一部分是常数,在实际计算时可以忽略不计。(论文里补充说明)
所以实际上SAC不用再维护V函数?
Soft Policy Iteration
就像绝大多数RL算法一样,算法交替执行Soft Policy Evaluation和Soft Policy Improvement,直到值函数和最优策略收敛,这一过程被称作Soft Policy Iteration。
SAC的实现
根据上面的解说,SAC在实际实现时,值函数和策略函数分别用两个网络和组成。值函数输出Q值,策略函数输出action的分布(均值和方差),需要一个高斯分布时再进行一次采样,具体的采样结果作为策略的决策动作。
-
Q值训练的损失函数:
训练Q时,数据是从agent过往与环境交互产生的数据(replay buffer)中取出,但是是从临时策略中采集出来的,这样才是合乎我们定义(Q是策略期望汇报),无偏的估计。
-
策略的损失函数:
- Z此时由上一个版本的值确定的,是确定的,只有a是由我们要argmin的决定的,所以我们需要从采样a,同时Z的值相当于变成常数,我们可以忽略。#QQQQQQQQQQQQQQQQ
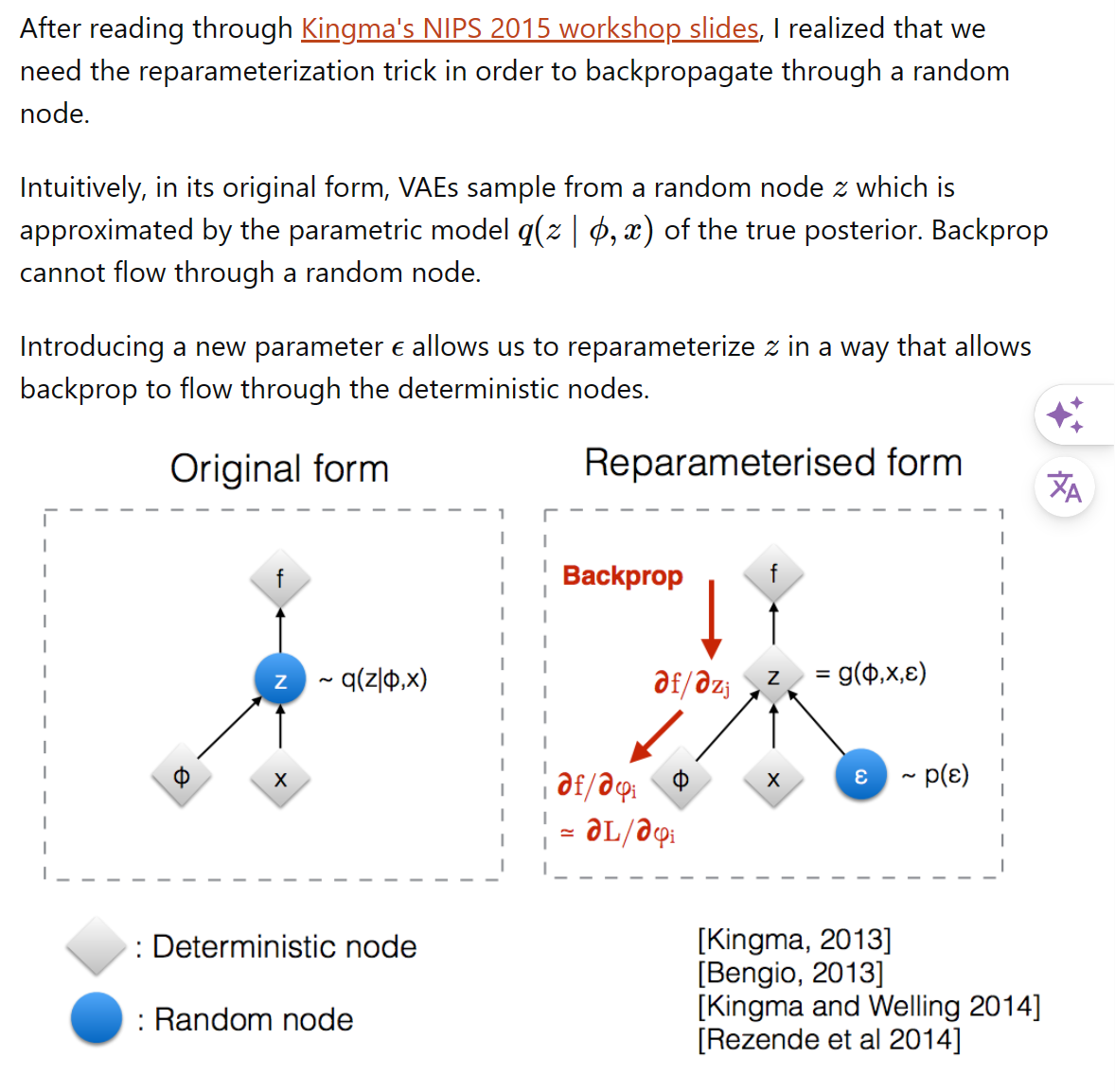
- 因为,实际操作时我们不能真的去抽样,因为抽样无法backpropagation,所以我们用reparameterization trick,即从一个固定的高斯分布中采样,然后通过一个线性变换得到最终的action:
其实就是有固定的mean和std,让后再随便抽一个随机数从而“确定性”的构造一个随机抽样结果,这样反向传播时的路是通畅的。
 于是最后:
$$J_{\pi}(\phi)=\mathbb{E}_{s_t \sim D, \epsilon \sim N}[\log \pi_\phi(f_\phi(\epsilon_t;s_t),s_t)-\frac{1}{\alpha}Q_\theta(s_t,f_\phi(\epsilon_t;s_t))]$$
于是最后:
$$J_{\pi}(\phi)=\mathbb{E}_{s_t \sim D, \epsilon \sim N}[\log \pi_\phi(f_\phi(\epsilon_t;s_t),s_t)-\frac{1}{\alpha}Q_\theta(s_t,f_\phi(\epsilon_t;s_t))]$$
最后只要不断收集数据,缩小这两个损失函数,就可以迭代收敛到解。
这里再提一下梯度的事:
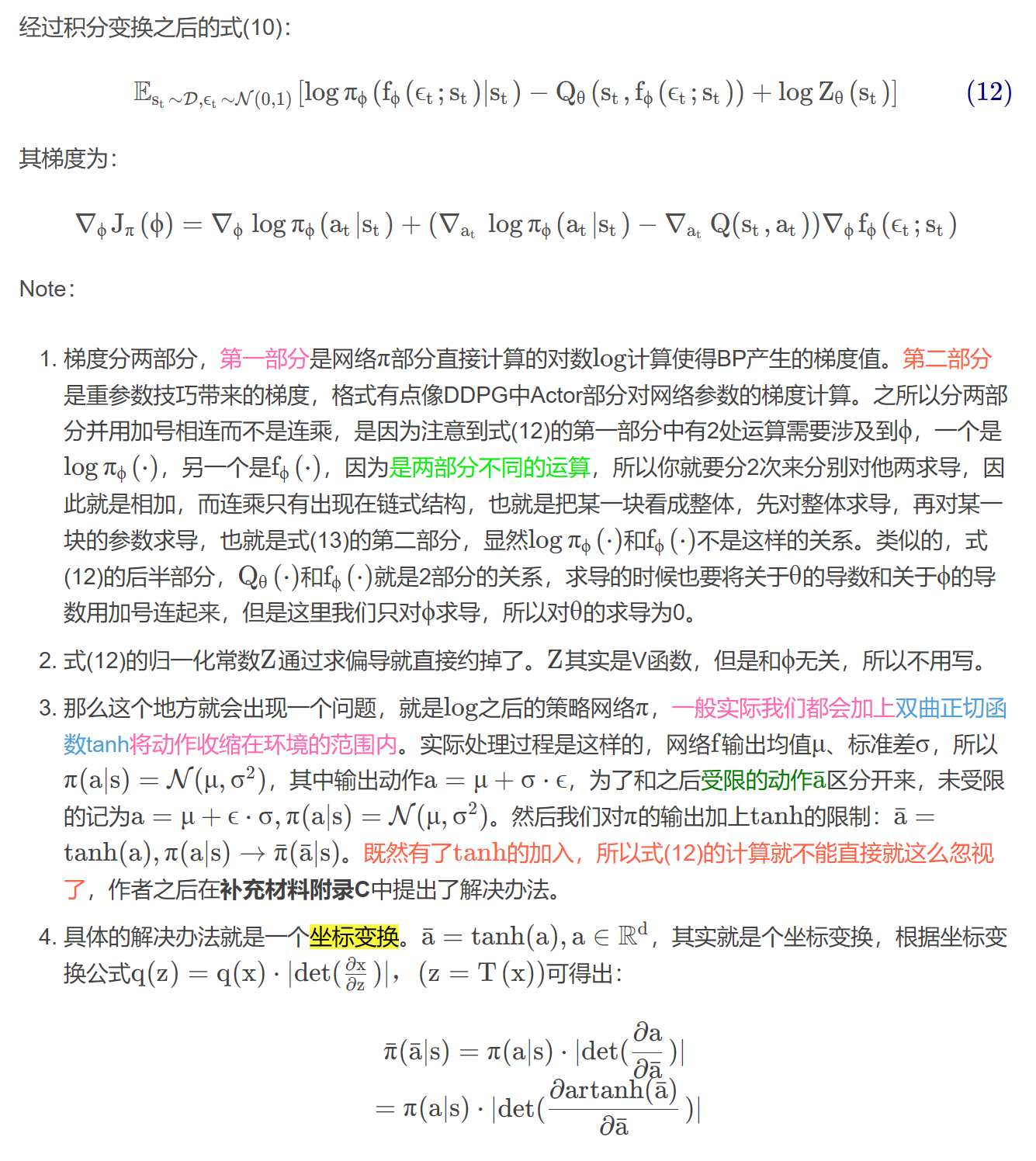
我没有理解梯度加法那个地方。#QQQQQQQQQQQQQQQ

SAC 杂谈
一些插件
SAC中依然可以用许多常见的trick,比如double Q network,target network等。
Automating Entropy Adjustment for MERL
这是一个重要改进,有助于SAC稳定。在自动调整温度系数方法之前,作者表示要同时维护V和Q两个值函数,为了让训练更加稳定。但是此方法引入后缓解了这个问题,于是只保留了必要的Q值估计。
参数之前作为一个hyperparameter控制MERL对熵的重视程度。但是不同的学习任务,甚至与同一训练任务的不同时期,都有自己合适的。我们自然希望这个关键参数可以让SAC自动调节。
作者构造了一个带约数的优化问题:最大化期望收益,同时保持策略熵大于一个阈值。
现在变成:
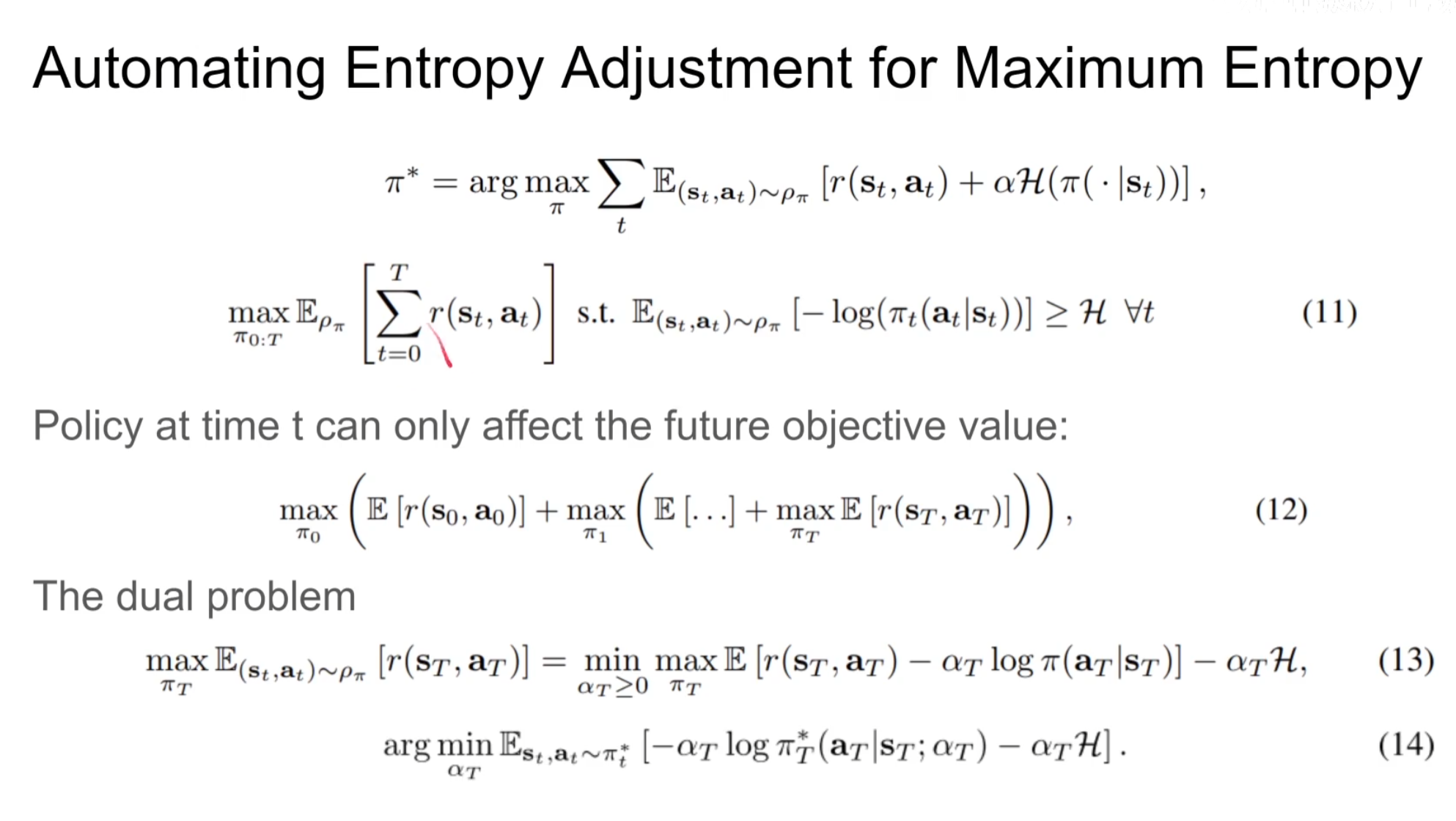
这里做一些解释:
这里策略的下标是指我们在程序里每一个step,每一个step策略都会更新一波,我们希望也能随之更新,我们把给熵项顶一个shreshold,希望实际的熵总是大于这个shreshold,这样我们就可以保证策略的探索性。
接下来从那一推max的式子由里往外推,并使用对偶性加入拉格朗日项从而把熵限制条件去除。这里作者称满足convex所以是强对偶,所以min,max可以互换,于是最优的可以通过最小化一个函数得到,这个函数里的策略函数也是当前最优的。这个公式里最优的是怎么来的呢?是我们确定了后,网络迭代出的(与的值绑定),所以最后直接优化最后一行的式子就可以了。
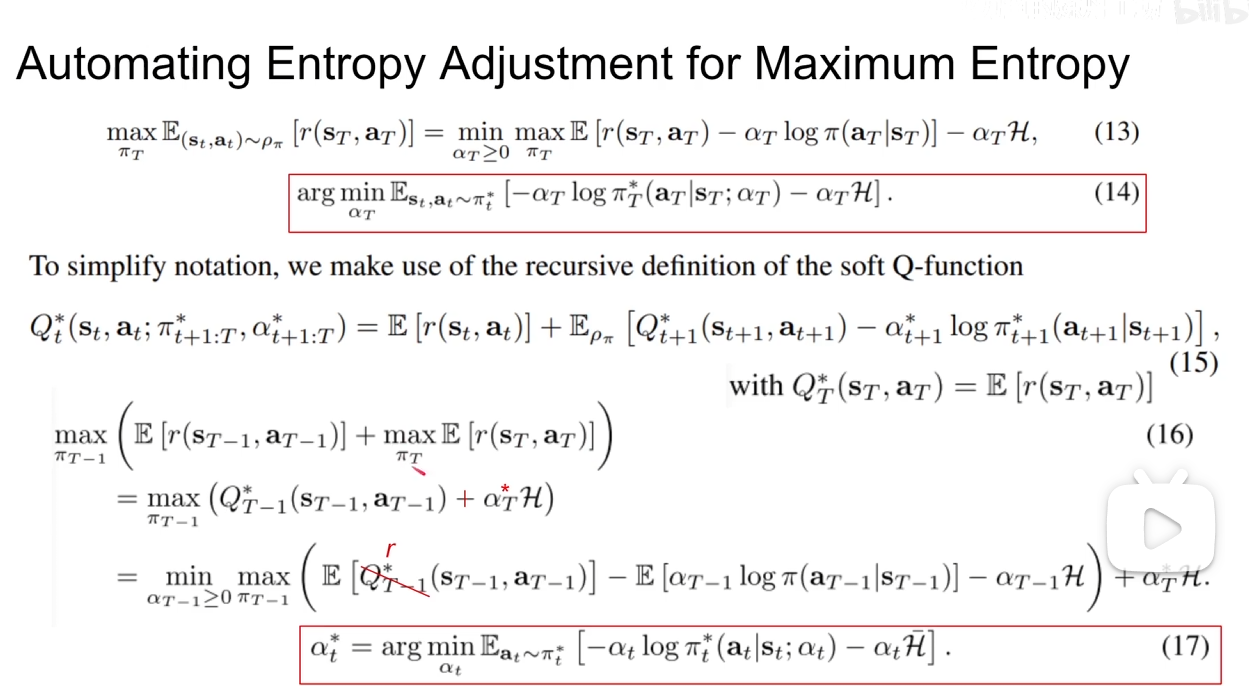
更进一步的,不只是最内层的max满足上式,对于所有时刻的和与之绑定的最后优化的式子都是同构的,所以在程序里每执行一次step,然后更新策略,最后更新,这样就可以自动调节了。(实际实现中,对应的来自上一轮更新的,为了节省再抽样的时间,因为整个过程是迭代的,所以这样做也是可以的)
最后经验之谈,我们设定为。(注意,连续动作空间用pdf积分出来的熵没有上下界,完全可以为负值)
一些杂谈
1. Model-free算法采样难度大,不易收敛
2. 限制model-free算法面向真实task的主要原因
- 采样复杂度大,效率低(on-policy最是这样,off-policy可以反复利用数据,稍微缓解)
- 难以调节超参数导致的收敛问题。
- off-policy还有稳定性差,容易发散问题,需要大量数据,特别是在连续空间上。(TD3等一系列优化off-policy方法都是为了解决这个问题,比如制定了延迟更新,策略平滑等)
- 超参数敏感,对不同task难以泛化
3. SAC同时兼顾采样效率和稳定性。
- SAC 是off-policy
- SAC采用最大含熵目标作为优化对象。以前,对每一个step都只有奖励,现在多一个,这种做法直接增加了算法的探索性和鲁棒性。对策略的挖掘(不容易陷于局部最优),以及对噪音的鲁棒性(有噪音时我还是有机会做其他动作),从而不会让agent轻易失效。
- SAC的off-policy让其sample变得高效,其最大化含熵性又让SAC稳定且有探索性。
4. 随机策略的好处
- 探索能力强。一方面从SQL中我们已经证明这种含熵目标的最优解是一种波尔茨曼分布函数,这种分布是一种概率分布,所以满足随机性。另一方面个人认为熵项可以看成正则化项,使得输出动作随机性增加,而不只是确定性动作。
- 在一些RL的task中,可能会有多个比较好的动作,随机性的策略会使得这些动作都能被选择到,而不像确定性策略,只能选一个固定的。
- 提升优化速度。作者发现优化含熵目标比优化标准目标更加快速。
- 当然还有其他好处,比如适合于多模式任务、可以作为另一个任务的初始化、鲁棒性等。
5. SQL与SAC的区别
- 基于Q-learning的SQL算法直接学习得到最优Q函数,然后得到最优策略。这是value-based的思想,先求出值函数,然后更具值函数求出策略,比如贪心策略。
- SAC则类似策略梯度上升,直接更新策略。这是policy-based的思想,直接对策略进行梯度上升进行更新。
6. 策略评估准确性证明
- 其实不同点就是引入了熵项,代入式子还是dp转移式子,最后收敛时一定是最优解。
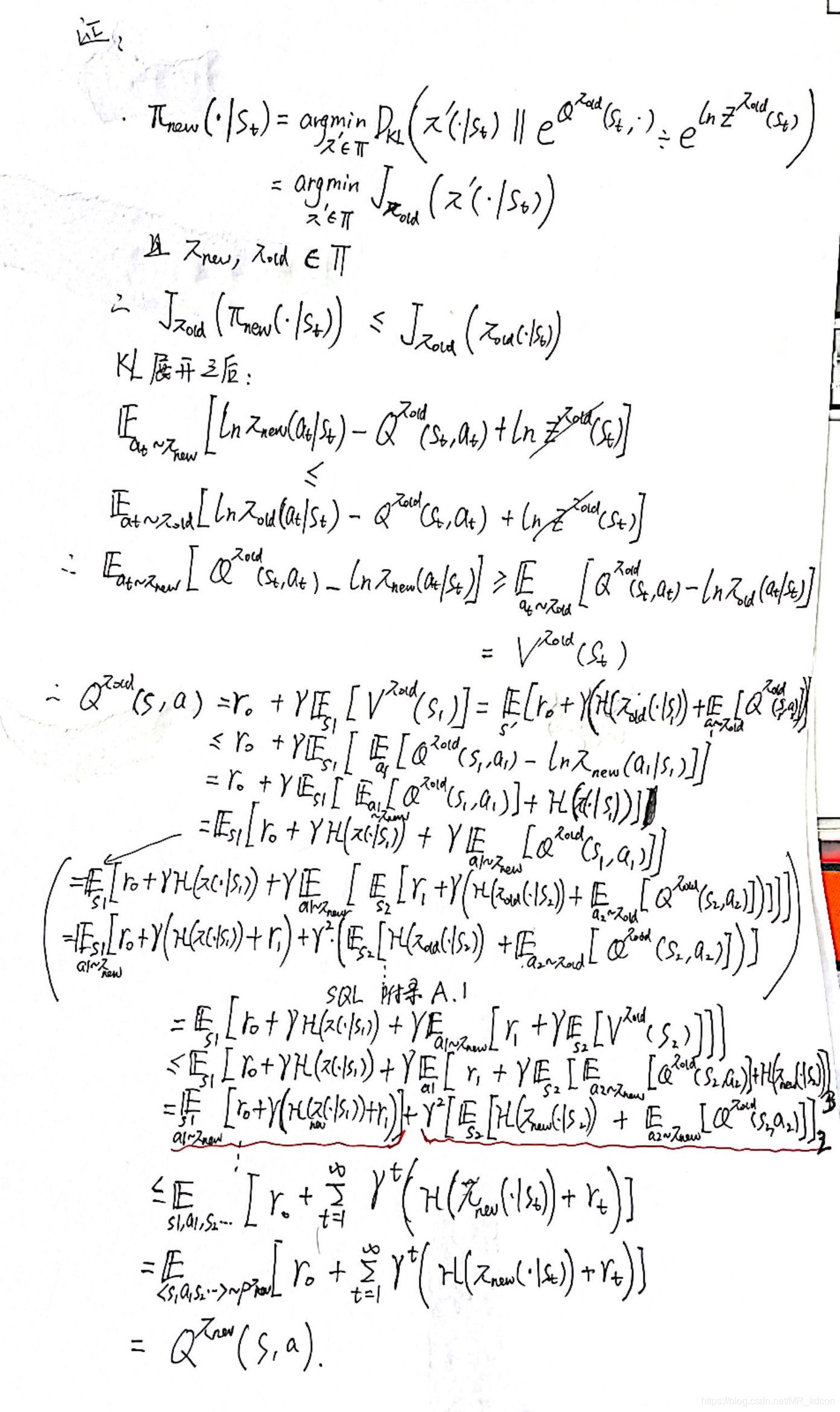
7. 策略提升
- 我们还需要证明Energy-based policy确实可以像之前的greedy或者策略一样,使得每一个step后,策略一定更优,即。
- 首先SQL告诉我们Energy-based policy是最大含熵目标的最优解,Energy-based policy具体为:
在这个问题中,视作Q值。
- 而我们的最优解是:
实际上这个最优解就是上面那个Energy-based Policy。
但是我们直接利用Energy-based函数方便是方便,但是之后需要从这个分布中抽样时就g了。所以我们曲线救国,还是用高斯参数的分布作为数簇,用神经网络调整高斯参数去逼近这个Energy-based Policy。虽然自然想到就用KL散度去衡量,但是有趣的是从KL散度的数学公式可以推出,只要KL散度梯度下降成功,那么新策略一定更优。
8. 策略迭代
- 现在我们有了策略评估和策略更新,即是广义策略迭代了,那么不断迭代下去理论上就可以收敛。
9. 过估计问题
作者为了缓解Q值过估计,使用两个Q网络,每次取两者较小的那个加入到V和的训练中。(注意两个Q自己是同时训练的,只是用谁的值去更新其他网络不同而已)
我们在对策略梯度上升时,会让策略停在使Q值较大的位置上,从而当Q值自迭代时会往高了估,同时如果估值有波动,自举的迭代形式会进一步恶化。所以我们需要双Q和target network。
10.Q网络和网络
- 都是采用随机梯度优化方式,没有采用SVGD。
- target network采用软更新(Exponentially moving average)。
- SAC采用AC框架,两个网络互相依赖,谁也离不开谁。
11. 随机性策略
- 避免过早policy不成熟地收敛
- 作者用去掉熵项的SAC(类似DDPG)作为对比,随机性SAC更加稳定,这在困难环境很重要。
12. 评测时策略
最终评测检验性能时,我们每次选择SAC分布的均值,最后结果好于标准SAC随机策略。
13. 奖励衰减
奖励值隐式的影响到熵值温度因子的平衡,所以需要调节奖励的scale来平衡奖励值和熵值。(后续SAC升级版设计了自动调节的温度参数)
14. SAC优缺点
- 优点:
- off-policy,采样效率高
- 稳定性好
- 鲁棒性好
- 随机性策略,有探索性
- 缺点:
- SAC的policy的目的是趋近于玻尔兹曼分布,但是实际实现的时候,为了能够tractable,选择了输出一个高斯,也就是让高斯趋近于玻尔兹曼分布。这意味着SAC本质上还是unimodal的算法(而不是soft q-learning的multi-modal)。这使得SAC的创新性打了很大的折扣。
- 温度因子α \alphaα需要针对不同环境进行调节,比较难搞。这个参数需要为不同的任务专门设计,甚至同一任务训练到不同时期,都各自有自己适合的。
15. 为什么SAC不用像PPO一样引入重要性采样?
SAC的策略更新逻辑其实跟DPG相似,都是希望策略朝着值函数中Q值更高的地方偏移。
值函数固定后就不用关心当前的策略与采集数据的策略差异。
Critic 用Q-learning,那么至少critic的优化必然off-policy,1-step Q-learning 不用IS。另一方面,前半部分,策略更新这块,DPG不用IS(也不能用IS),这也是对的。但是,其实随机策略也可以不用IS,SAC就是一个例子。当AC算法以值函数为中心,策略更新完全依赖值函数,不关心当前策略的实际收益时,Actor部分也成了off-policy。
而PPO是基于当前的策略,用Q值函数去调整当前策略,需要去评估策略的表现,此时就需要IS了。
16. 为什么使用KL散度别捏的去拟合能量密度函数,而不用MCMC方法
policy是在线更新,MCMC必须也跟着在线变化,但是每一次收敛太慢了,不适用于在线更新
(来自GPT)
Markov Chain Monte Carlo (MCMC) 方法是一种强大的采样技术,能够从复杂的概率分布中生成样本。尽管MCMC在许多领域内都非常有用,尤其是在贝叶斯统计推断中,但在需要在线推断的情况下,即在实时或接近实时情况下执行策略时,使用MCMC方法面临一些实际挑战:
-
计算成本高:MCMC方法通常需要大量的迭代来生成一个近似于目标分布的样本集合。每次迭代可能涉及复杂的计算,特别是在目标分布的形状复杂或维度很高时。
-
收敛速度慢:MCMC方法可能需要数千到数百万次迭代才能收敛到目标分布,这对于需要快速响应的在线系统来说是不可接受的。
-
难以评估收敛状态:在实际应用中,很难判断MCMC链是否已经收敛到目标分布。这增加了在线推断的不确定性和风险。
-
在线更新的挑战:在在线学习或决策场景中,环境和数据可能不断变化,这要求采样方法能够快速适应新的条件。MCMC方法适应这种变化的速度可能不够快,因为需要重新运行长时间的链以适应新的分布。
因此,尽管MCMC是一种在离线环境中非常有用的采样工具,但由于其高计算成本和慢收敛速度,它不适合需要实时或近实时决策的在线应用场景。在这些情况下,学习一个随机采样网络(如在引用的文献中提到的那样),这种网络被训练为能够从目标分布中直接生成近似样本,可能是一种更实用的解决方案。这种方法可以显著降低采样所需的时间,使其更适合在线和实时应用场景。