
Prioritized Experience Replay
Prioritized Experience Replay
Experience replay的演化
online RL:缺点:经验之间是correlated的,不满足stochastic gradient-decent的要求。另外,有用的好经验被使用一次后就遗忘了。
普通的experience replay可以记下经验,然后抽样更新参数,这样一方面减少了对打量经验的需求,转而用更多的计算力和内存(经常比RL agent和环境交互更cheaper)
而Prioritized experience replay further liberates the agents from considering transitions with the same frequency that they are experienced.

一些tricks
总的来说,用TD error来衡量经验的重要性,但是这样有两个问题:
(a) loss of diversity,影响stochastic gradient descent的性能。
(b) introduce bias,需要我们用importance sampling去纠正。
这样一来可以更快,并且state-of-the-art
background: 过去有类似的方法,在supervised learning中有用positive/negative分别抽样去做replay,在某些特定领域这些做法也有较好但是表现。
现在我们对prioritized experience replay引入stochastic sampling,这样可以保持diversity,同时也可以加速并提升训练质量。
启发实验
在一个只有rare action才能有收益的环境中,考虑收益大的action是很有用得,因为一旦得到宝贵的分数,就可以据此来更新,而不是还要经历一个随机uniform抽样过程。
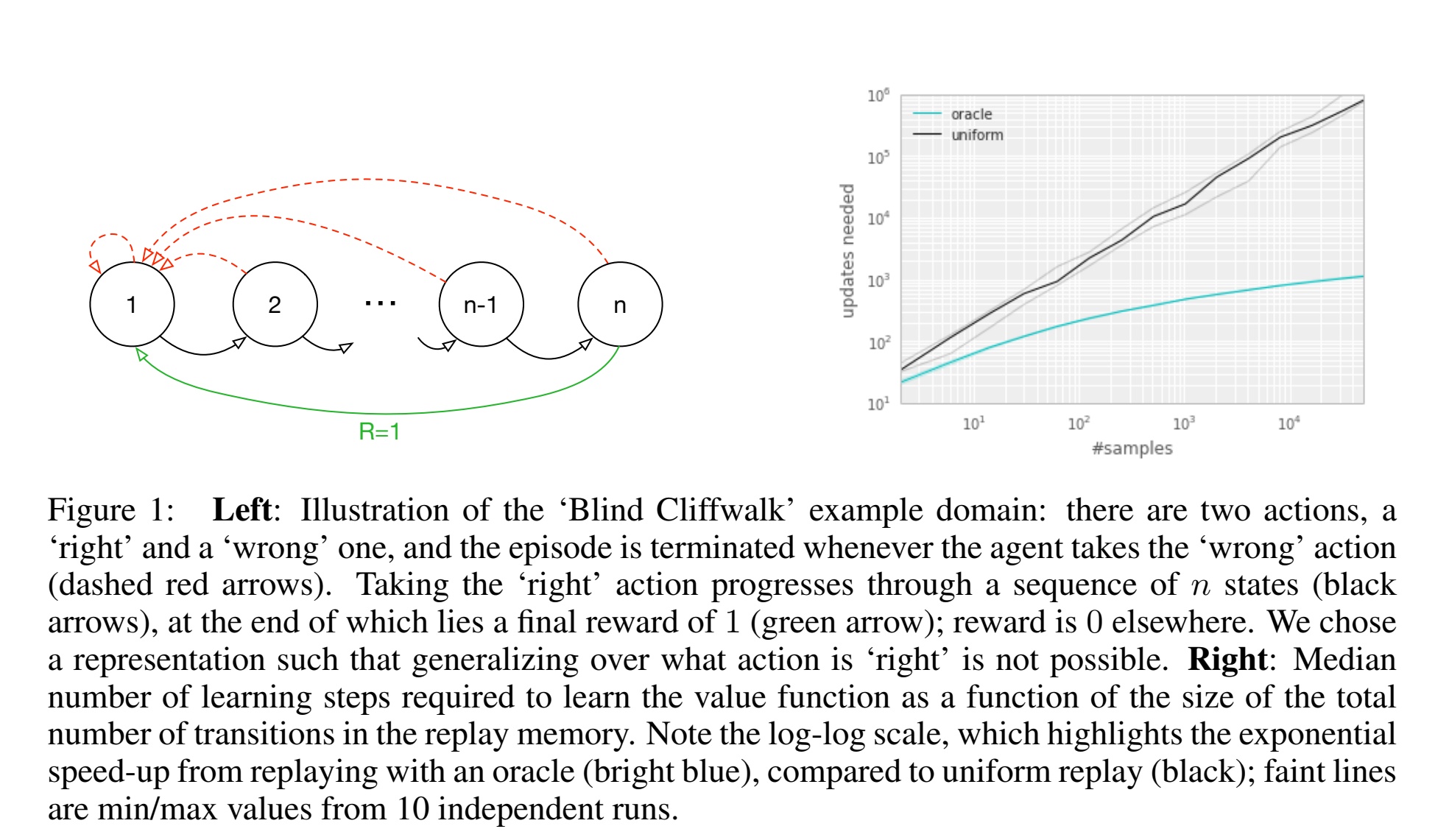
在log-log右图中,可以看到oracle的经验选择在指数上遥遥领先于uniform sampling。
理想的priority标准应该是RL从transition中学习的速度,但是这个值不能直接获得,一个合理的代替是用TD-error,which indicates how surprising a transition is.(但是对于reward有noise的情况可能会不太准)
和之前的uniform choose和oracle相比,TD-error-greedy-choose也能有指数级别的提升,同时为了保证至少抽样一次,在经验第一次加入时外面将其优先级设置为最高。
但是直接按照greedy-priority会有问题:
- TD-error较低的transition在很长时间不会再被replay
- 同时在reward有noise的情况下在bootstrapping中会恶化。
- diversity缺失,因为这样attention全在一个较小的subset里,意味着容易过拟合。
未来解决这些问题,我们在pure priority和uniform中平衡,我吗需要保证所有的transition都有大于0的概率被抽样,同时又要根据不同的TD-error设置不同的抽样概率。

其中平衡的degree由超参数决定。
其中就是我们设定的有限度。
的表示方法
两者都是随着单调的,但是后者更robust,因为和具体的量级不敏感。
实现上来看,因为N(经验回放数组)一般非常大,所以我们希望抽样k(batch)的时间与N无关。论文中采用分段抽样的方法,根据N,k,提前计算好分块,每次从k块里每个块uniformly抽一个,近似上述公式的抽样效果。
Rank-based prioritization
用数组实现的二叉堆确保大概是有序的,然后在上面做sample,同时隔一段时间sort一次防止过于不平衡。
Proportional prioritization
Importance sample
然而,使用prioritized 经验放回算法是有缺陷的,因为收敛正确性的假设与pure stochastic gradient decent有关,但是显然,即使上述修正过的优先抽样算法也会introduce bias,影响最后收敛的结果。
所以我们需要尽可能修正这个bias,和sutton书中off-policy中更具概率调整评估值比较相似。
(来自晨神summary)
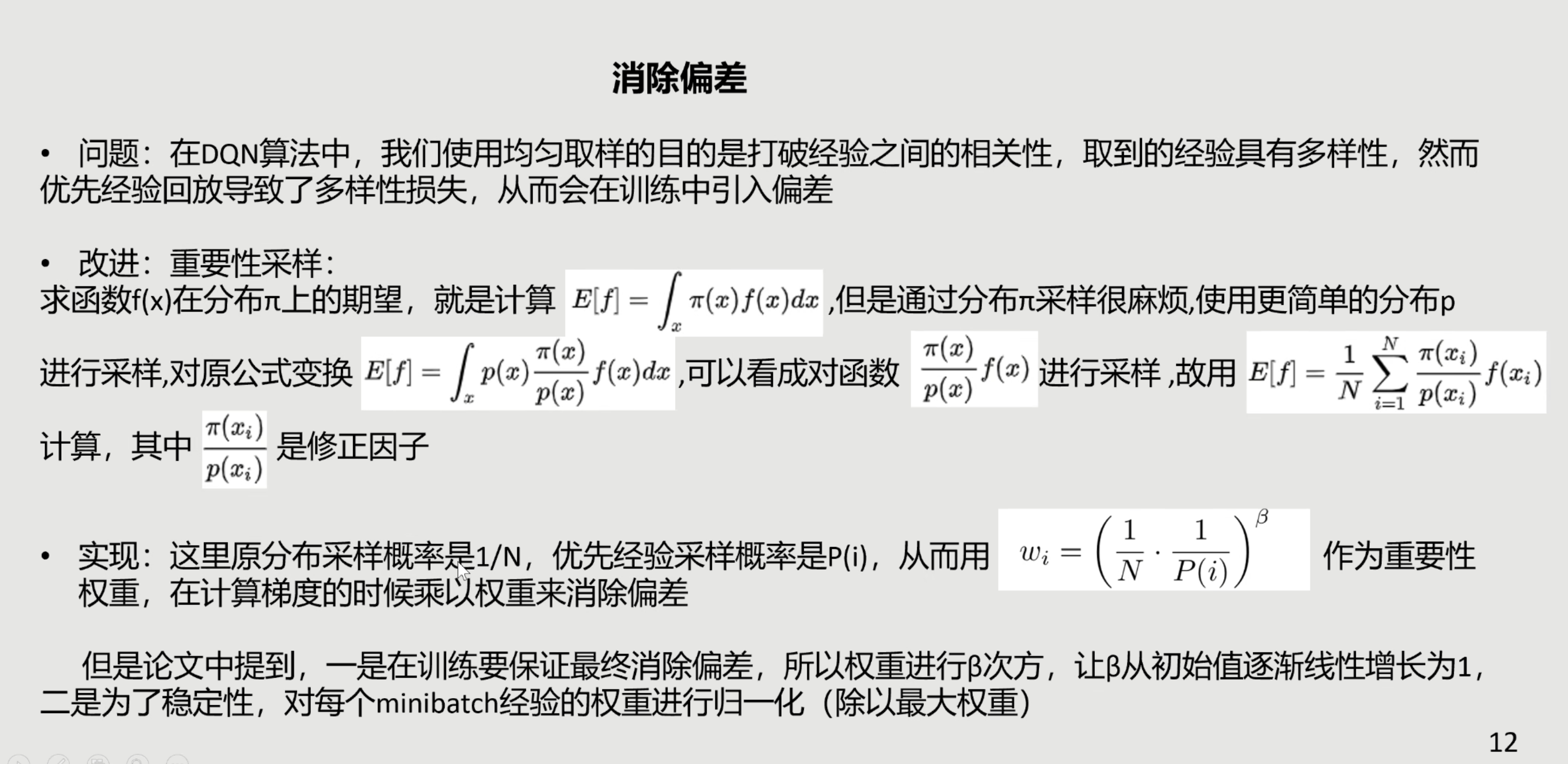
当是1时,就是一个完全概率补偿,为了更稳定,所有都要乘以,确保小于1.
在最后一步计算梯度时,乘上即可。(优先度依然是按照pure TD-error计算。)
虽然保持为1可以是unbiased,但是这样会降低我们优先sampling的效果,所以我们采用退火的想法,从初始值(接近0的较小值)到最后的1,这样可以兼顾两者的好处。
同时importance sample还有一个好处,因为在deep network中一阶泰勒近似只在local field成立,步长不能太大,而优先TD-error一定是大的,但是引入importance sample和会被中和,对梯度下降也是好事。
实验制定
- 1e6经验空间
- 32batch 每次进4个
- reward和TD-error都被截断到 (更稳定)
- 其他结构和传统DQN相同
- 学习率下调4倍 因为相对梯度都比较大
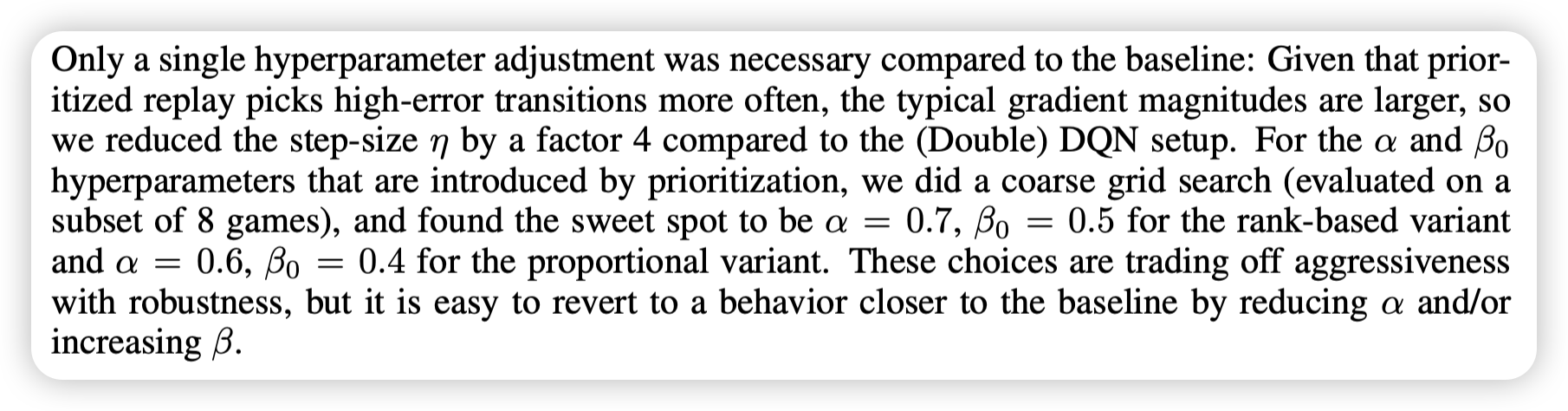
rank形式的优先抽样会更好
- 分布图是heavy-tail,更保证抽样的diversity,同时minibatch gradient保持在一个相对稳定的大小。
- 在reward稀疏和noisy时候,不会太受影响,因为对相对error不敏感。
优先经验回放还有这样的好处:
- 确保至少抽到一次(对于没抽样的bonus)
- 不会太会只抽到一次,越旧的不会再更新,因为已经有很多机会更新了。越新的transition说明value evaluation越不准确。
总的来说,所提出的假设表明,在类别不平衡的数据集中,训练过程可能会无意中更加关注罕见类别,并且会策略性地选择来自常见类别的样本,以改善模型的性能,类似于硬负样本挖掘的效果。
一些思路拓展
- 制造很多并发但是异构的actor(不同的exploration hyperparameter),我们的优先度决策可以指导运算资源的分配。
内存里的优先经验存放的机制很灵活:
- 可以删除经验,因为以及被频繁访问的经验或者没有价值的经验没有用处了。
- 删除同时应该强调diversity,比如更具how old they are进行调节,已保留足够的旧经验来防止循环。
- 可以继承其他(如人类专家)的经验数据,如保留一定比列的外部经验。
diversity:
-
按照不同priority分开抽样
-
制定奖励分,一个transition越久不replay就越加分。(可以维护一个全局步数轻松实现)
-
Reverse replay: 发现一个change很大的s,我们反向拓展可能会到s的节点s’,调高s’的优先度。
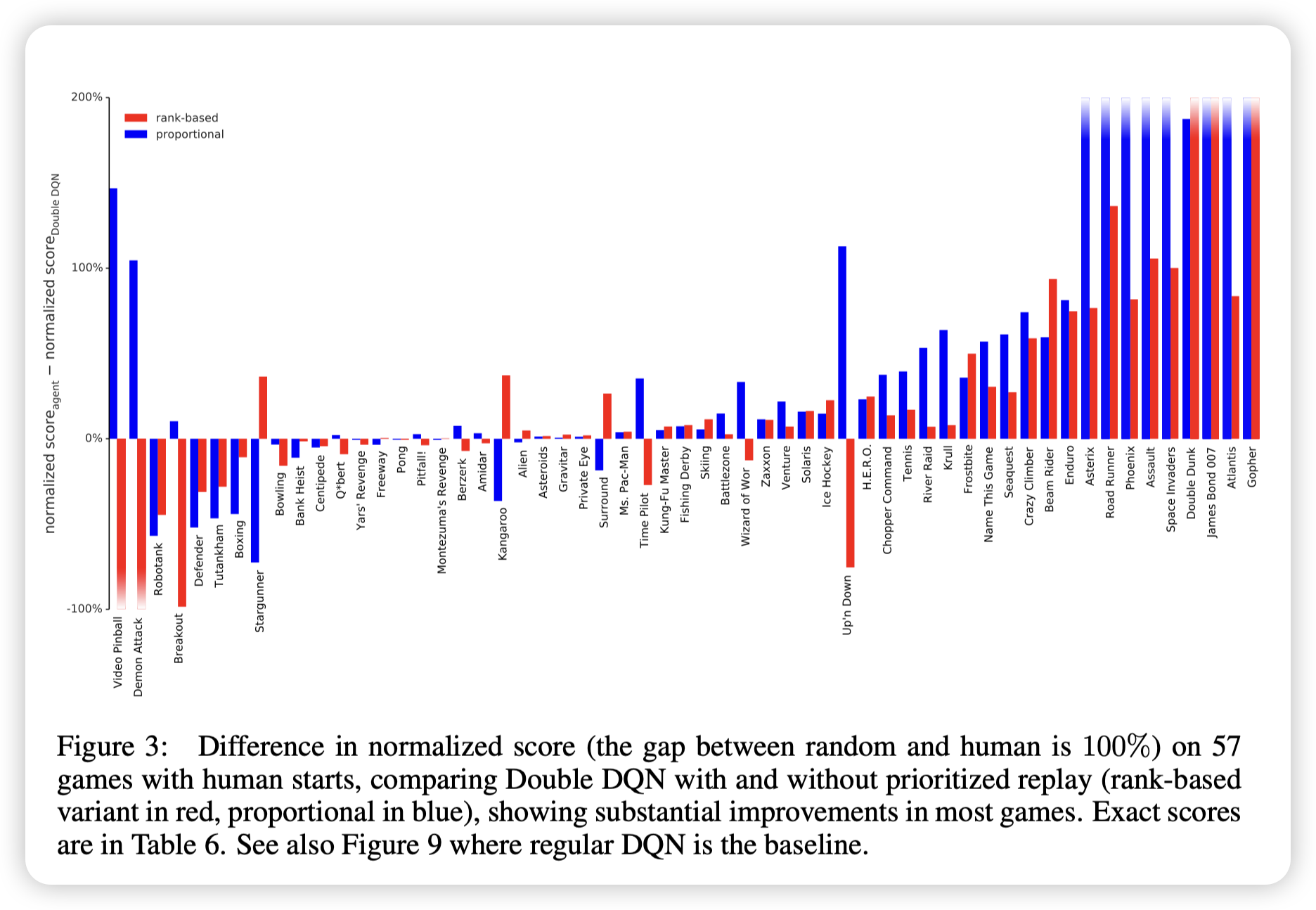
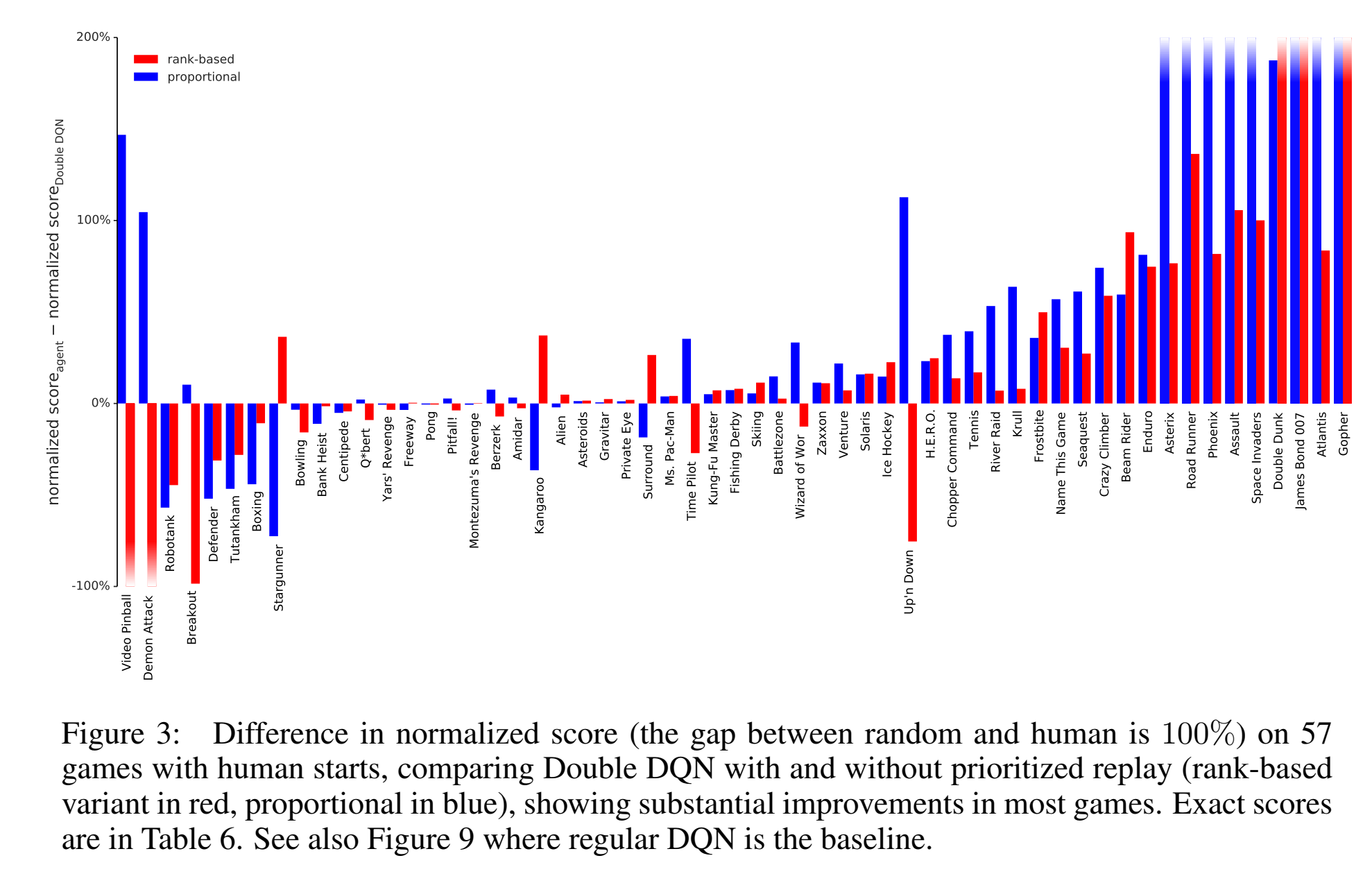
实验结果
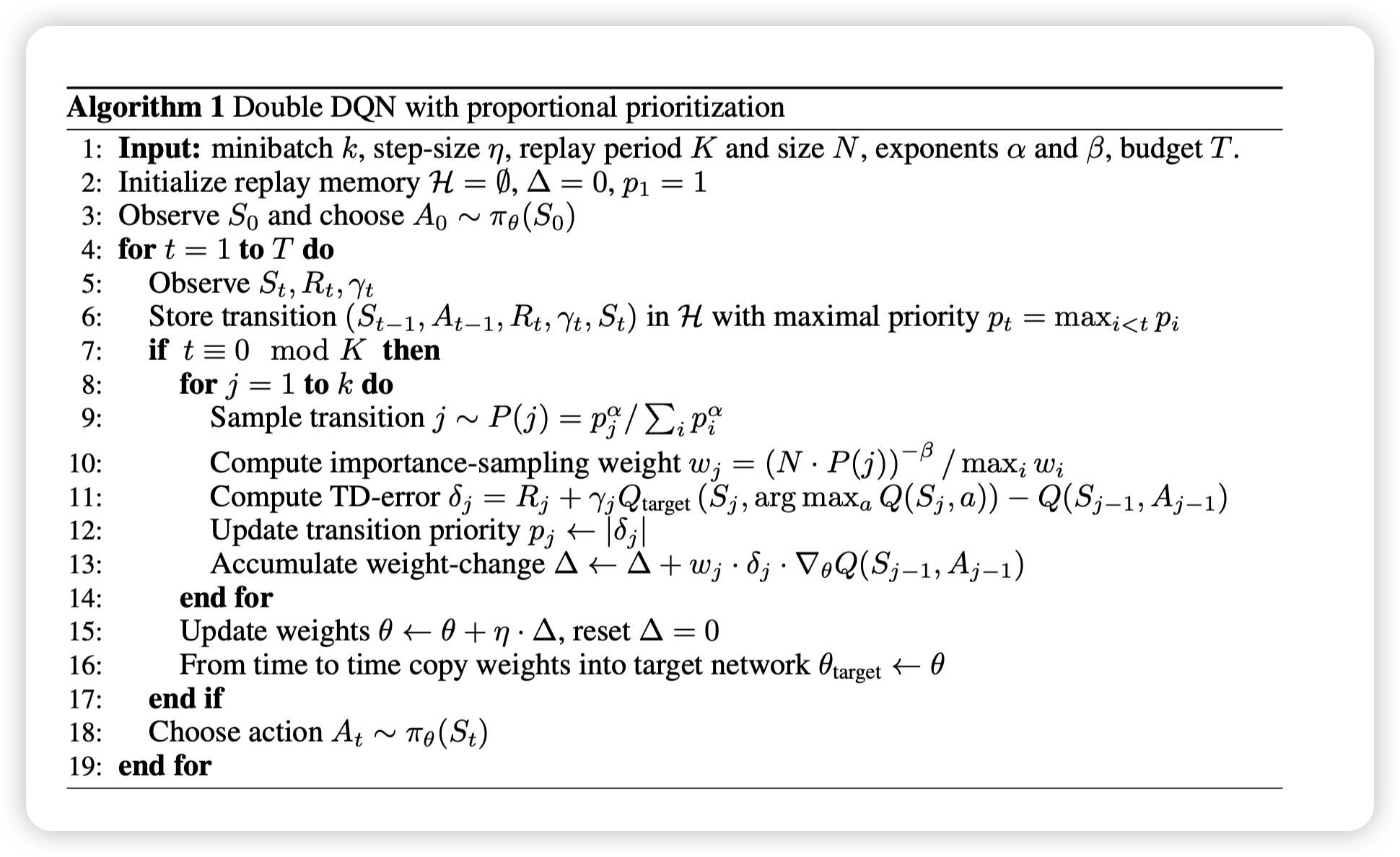
实现伪代码:
在数据不平衡时,优先度经验回放works
IS:让学习不再那么激进,在初始阶段会慢一些,但是更小概率会不成熟收敛,同时sometimes ultimately better results.
 。
。