
IntroAI_HW4 Freeway_Game Lab_Report
报告题目:Freeway Game
detect0530@gmail.com
2023年12月
1 引言
强化作为机器学习比较新的一个分支,广泛用于游戏ai中,本次实验,将以Freeway Game作为例子,运用强化学习的方法,训练一个能够自动玩游戏的ai。
2 实验内容
2.1 Task1
2.1.1.0 阐述强化学习的方法与过程
实验Sample code采用的是传统的Q-learning方法,Q-learning是一种基于Q值的强化学习方法,其核心思想是通过不断的迭代,更新Q-table,最终得到一个最优的Q-table,从而得到最优的策略。
具体来说,需要维护Q-tabke来辅助决策,Q-table记录了每个statement对应每个action的打分。这一步我们引入了三个东西:
- 状态 : 指游戏或模型中不同的状态定位,当然在特征工程的帮助下,也可以看作特征,
- action : 指游戏/模型规定的运作方式。
- 打分 :又涉及heuristic函数,来对当前状态以及action评分。
Q-learning 强化学习算法流程:
第一步设计对状态的评估函数Q,Q(s,a)表示在s状态下a动作的评分。
第二步,让游戏/模型自己运行,运行的效果好也罢,不好也罢,不重要,我们唯一要做的事情是在运行时不断对Q(s,a)进行调整,最终希望所有的Q(s,a)收敛,这样我们在之后的游戏里,就可以直接利用收敛的Q-table来确定当前状态下,最优秀的action是哪一步了。
第三步,调整说来容易,如何才能做到了。贝尔曼将这个故事继续演绎了下去:
解释一下:
R时执行动作a后得到的奖励,当前时s状态,找到动作a后会前往下一个状态s‘,而后在s’状态下找到一个最大化的Q(s’,a’)即可。
分析一下参数的含义:
- (学习率)代表了新的Q值能从旧的Q值学到多少比重。
- (折扣因子)代表了未来奖励的折扣因子,如果越大,那么越重视未来奖励,反之,越重视当前奖励。
故事到这里就结束了,只需要不断的让游戏/模型运行,然后不断的调整Q值,最终Q值收敛,我们就可以直接利用Q值来决策了。
2.1.1.1 策略模型
sample code中巧妙地使用了epsilon参数来控制随机性,从而避免陷入局部最优解。具体来说,每一次决策,都有的概率随机选择一个action,而有的概率选择当前状态下,Q值最大的action。
这样一来,赋予了策略随机性有机会让模型跳出局部最优解.
同时,我注意到sample code里使用了:
m_c = new weka.classifiers.trees.REPTree();
REPT分类器,这是一种基于决策树的分类器,其核心思想是通过不断的迭代,将数据集分割成多个子集,最终得到一个决策树,从而得到最优的分类器。
依托于决策树而非传统的Q值表。树与表的结构相比可以自由确定特征选择,从而更好的学习到特征之间的关系。
最后再从REPTree转换会Q-table进行决策。
2.1.1.2 模型缺点
- 由于Q-learning是一种基于Q值的强化学习方法,其核心思想是通过不断的迭代,更新Q-table,最终得到一个最优的Q-table,从而得到最优的策略。但是这种方法的缺点是,需要维护一个Q-table,这个Q-table的大小是与状态数和动作数成正比的,如果状态数和动作数很大,那么这个Q-table就会很大,这样就会导致内存不够用,或者是计算速度很慢。所以这种方法只适用于状态数和动作数比较小的情况。
但对于本问题,光是sample code的特征就有八百余个,特征过多带来的问题:
- q-table里状态太多,数据量不够的情况下,很难收敛。
- 特征过多,
1 | while (m_dataset.numInstances() > m_maxPoolSize) { |
可以看到,sample code中限制了dataset的数量,这也是特征过多的后果。
2.1.1.3 改进方法
改进特征的表示方法,将特征进行refine和降维,从而减少特征数量,同时也可以减少状态数量。这一部分会在之后详细介绍到。
2.1.2 SIMULATION_DEPTH, m_gamma, m_maxPoolSize
- SIMULATION_DEPTH
代表训练模拟的深度,越深意味着训练集越充沛,但是同时也意味着训练时间越长,所以需要权衡。
- m_gamma
这是一个衰减指数,代表了未来奖励的折扣因子,如果越大,那么越重视未来奖励,反之,越重视当前奖励。
- m_maxPoolSize
代表了dataset的最大数量,超出这个数量,会像queue一样把最早记录的data删去。可以控制储存的dataset的大小。
2.1.3 getAction 和 getActionNoExplore
这两个函数都是用来决策的,区别在于getActionNoExplore不会随机选择action,而是直接选择当前状态下,Q值最大的action。
- getaction: 用于训练,会随机选择action,从而避免陷入局部最优解。
- getactionNoExplore: 用于测试,不会随机选择action,而是直接选择当前状态下,Q值最大的action。
2.2 修改特征提取方法
在讨论特征提取的优化之前,先让我们留意原始sample code相当不合理的几个问题:
- 修改1
1 | public int getAction(double[] feature) throws Exception{ |
在这里,我将epsilon greedy choice前置了,因为需要随机选择的我们就不需要计算Q值了,这样可以节省一些计算量。(sample code里将epsilon greedy choice放在了计算Q值之后)
- heuristics函数
我发现sample code里调用的是winheurstic function,里面只基于游戏输赢判断。 这非常不合理,因为游戏输赢只是一个二元的判断,而我们需要的是一个连续的评分,这样才能更好的反映当前状态的好坏。
所以我将heuristic函数进行了改进:
1 | public double evaluateState(StateObservation stateObs) { |
-
加入深度引导,显然我们希望avatar所在层数越高越好,所以我加入了一个dis变量,表示avatar所在层数,然后将其作为一个惩罚项,这样就可以引导avatar向上移动。
-
同时我们希望avatar所在的x坐标越靠近中间越好(可以左右连续移动更佳灵活),所以我加入了一个惩罚项,这样就可以引导avatar向中间移动。
ok,至此前置工作完成,我们开始考虑重新设计特征提取。
原来的特征包括所有的地图特征,显然avatar当前的决策不需要考虑地图的所有特征,只需要考虑avatar周围的特征即可,所以我们可以将地图特征进行refine,只保留avatar周围的特征。

经过调整试错,最后决定保留的地图特征。
这样一来,我们只会关注周围的地图,且后两排的关转范围比后一排大,这样就可以更好的引导avatar向上移动。同时因为有事会被逼退,所以也要考虑之前一行的地图特征。
同时地图特征必须与avatar自己的坐标交互,于是同样要保存avatar的横纵坐标。
1 | public static double[] featureExtract(StateObservation obs){ |
这样一来,我们update了特征选取的方法,同时也减少了特征数量,从而减少了状态数量,这样就可以更好的收敛,储存,计算。
(在使用默认的参数的情况下)从得到的结果来看,10次有2-3次可以通关游戏,但是不是很稳定,有时还是会在某些位置反复横跳或者跑到角落里去了。
不过总的来说,进步已经相当明显了。(运行sample code根本没法通关)
2.3 修改强化学习参数
- epsilon: 0.3 --> 0.2
游戏里只要碰到障碍物就会回到初始层,多掉几次就会寄。在关键时刻的决策又很重要(甚至一步走错了,会导致几步内无解),于是我们尽量减少训练过程中的随机性,从而减少这种情况的发生。
- agent parameter:
1 | protected Classifier m_model; |
因为我们的特征数量减少了,所以我们可以增加SIMULATION_DEPTH和m_maxPoolSize,从而增加训练集的数量,从而更好的收敛。
同时略微减少m_gamma,从而更加重视当前奖励。
3 实验 performance
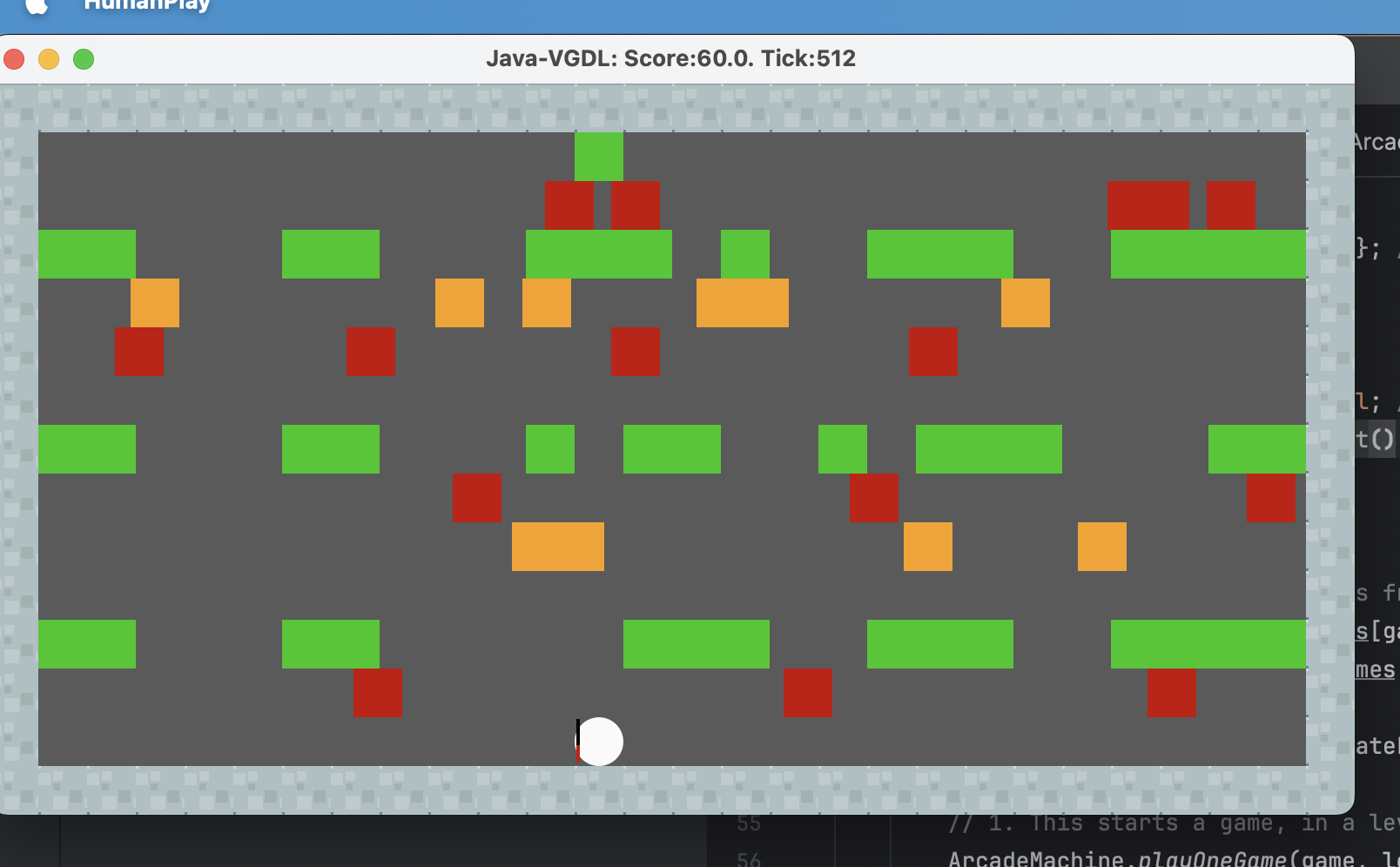
在经过以上的改进之后,游戏推理期间,前3次可以稳定快速通关,这是我们非常期待的事情的。
这是较好的一次结果:
但是同样也碰到了一些问题。
因为我的特征提取只提取了avatar周围的地图,又因为每一层障碍物移动是固定方向的,所以avatar会记住障碍物在周围时该如何行动,但是却没有足够多的data告诉它当周围没有障碍物时该怎么走,于是就会出现这种情况:
- 第一层障碍物固定从左往右,按照较大的间隔出现并移动。
- avatar在前几次尝试中学会了如何躲过障碍物前进,但是却没有学会如何在障碍物不在周围时前进。
- 于是每一个障碍物出现时,avatar的缺会躲开,但是会跟着这个障碍物往右边移动一小段,直到被这个障碍物甩开,但是此时又进入了下一个障碍物的检测范围,又回跟着这个障碍物往右边移动一小段,直到被这个障碍物甩开,如此循环。
- 结果就是如果第一层右侧挡板较多难以突破时,就会跟着移动的障碍物大方向往右边走,直到卡在最右段,如果最右段被挡板封死了,就会一直循环躲避障碍-被阻挡-躲避障碍物的循环而耗尽时间输掉游戏。
这是一个比较糟糕的结果:
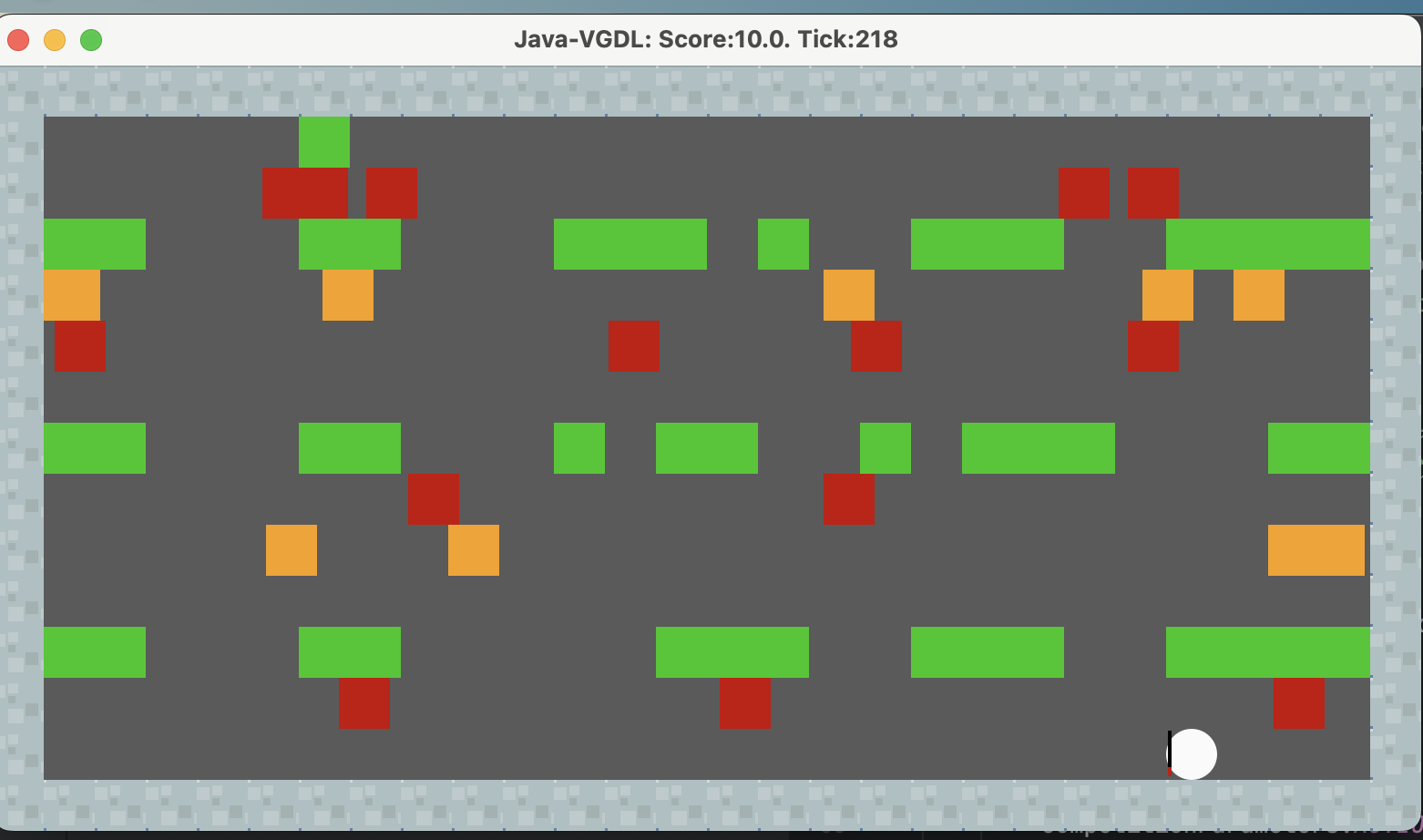
就像上述说的一样,被第一层障碍物的出怪频率和方向卡死在最右角。
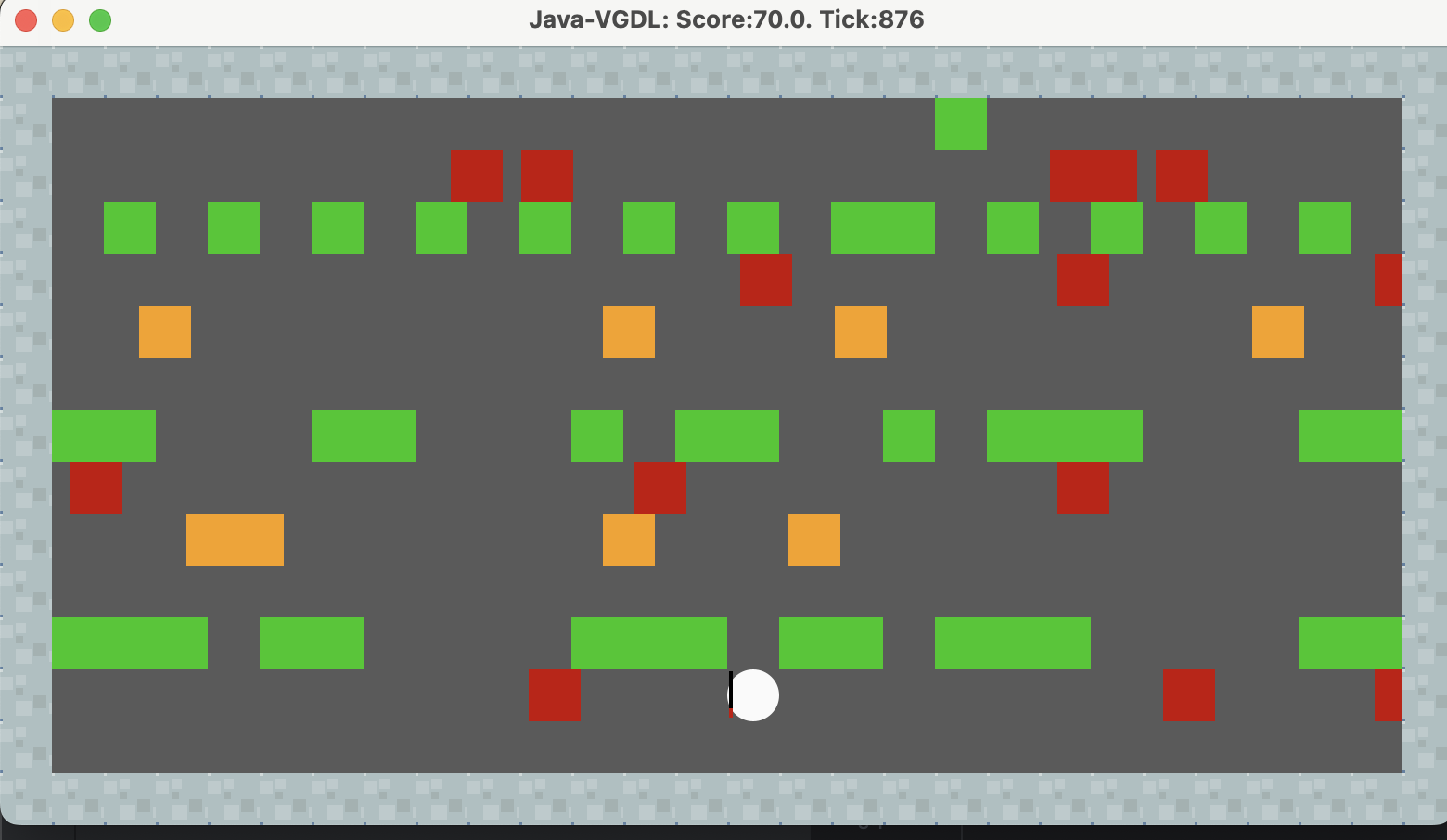
但是对于第一层出怪没那么频繁,且第一层阻挡物不是很多(其他层多,但是其他层不会像第一层障碍物那样太少了),就可以稳定通关。
像这样:
4 总结
本次实验,我学习了强化学习的相关知识并在freeway游戏里得到了运用,同时也对强化学习的方法进行了改进,使得游戏的通关率/速度大大提高。
改进涉及:heuristic函数、代码结构、特征提取方法、强化学习参数等。
很高兴能有这样的机会学习强化学习的相关知识,同时能够在这样的实验中得到运用。